
【導(dǎo)讀】對于那些為物聯(lián)網(wǎng)應(yīng)用領(lǐng)域開發(fā)智能傳感器的人士而言,性能與功耗的關(guān)系是最微妙的權(quán)衡考慮。在廣闊的性能空間中,噪聲常常是一個重要的評估因素,因?yàn)樗苤萍s智能傳感器中關(guān)鍵功能模塊的器件選擇,進(jìn)而提高功耗負(fù)擔(dān)。此外,噪聲特性在很大程度上決定了濾波要求,而這又會影響傳感器對條件快速變化的響應(yīng)能力,延長產(chǎn)生高質(zhì)量測量結(jié)果所需的時間。
在支持連續(xù)觀測(采樣、處理、通信)的應(yīng)用中,系統(tǒng)架構(gòu)師常常不得不解決噪聲與功耗相互對立的關(guān)系,因?yàn)樵肼曌畹偷慕鉀Q方案很少正好也是功耗最低的解決方案(就特定功能類別的器件而言)。例如,MEMS加速度計(jì)常常用作遠(yuǎn)程傾斜測量系統(tǒng)的核心傳感器。表1顯示了兩款不同產(chǎn)品的重要特性,它們提供目前在業(yè)界領(lǐng)先的噪聲或功耗性能:ADXL355(低噪聲)和ADXL362(低功耗)。
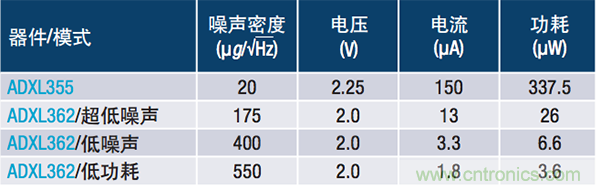
表1. MEMS加速度計(jì)比較
表1包括四行,其中三行對應(yīng)ADXL362的可選工作模式,剩下的一行給出了ADXL355的主要指標(biāo)。從這一權(quán)衡空間的關(guān)鍵邊界開始,ADXL355的噪聲比最低功耗模式的ADXL362要低幾乎27倍,但前者的功耗要高得多。性能要求更具挑戰(zhàn)性的應(yīng)用可能需要考慮ADXL362的最高性能模式,此時ADXL355的噪聲要低9倍,但ADXL362的功耗要低13倍。
在不需要連續(xù)觀測的應(yīng)用中,平均功耗與噪聲的關(guān)系變得更有意義?;蛟S令人難以置信,但噪聲和功耗的關(guān)系甚至可能變成互補(bǔ)式。這對開發(fā)人員來說無疑是個好消息。因?yàn)樵谥暗脑O(shè)計(jì)中,開發(fā)人員可能因難以確定該讓功耗還是性能主導(dǎo)其設(shè)計(jì)而延誤了時機(jī)。而現(xiàn)在,無需等待其他人在這一權(quán)衡中做出決定,智能傳感器架構(gòu)師可自行對權(quán)衡范圍內(nèi)的相關(guān)選項(xiàng)進(jìn)行量化;這一做法將重新定義架構(gòu)師的工作。
智能傳感器架構(gòu)
為了量化特定應(yīng)用的相關(guān)選項(xiàng),首先需要對信號鏈做一些假設(shè),因此可以從概念架構(gòu)開始。圖1是智能傳感器架構(gòu)的一般例子,其中包含了最常見的功能。
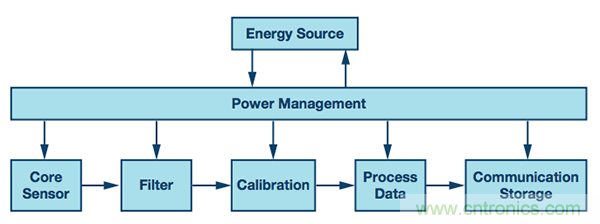
圖1. 智能傳感器架構(gòu)
核心傳感器
智能傳感器節(jié)點(diǎn)中的信號鏈從核心傳感器功能開始。最基本形式的核心傳感器也稱為變換器,其將物理?xiàng)l件或?qū)傩赞D(zhuǎn)換成代表性的電信號。傳感器的比例因子描述其電響應(yīng)與其監(jiān)控的物理屬性或條件的線性關(guān)系。例如,提供模擬輸出的溫度傳感器(如AD590)的比例因子單位為mV/°C;數(shù)字加速度計(jì)(如ADXL355)的比例因子用LSB/g或碼數(shù)/g來表示。
濾波器
信號鏈(圖1)的下一個功能模塊是濾波器。這一級的作用是降低核心傳感器可能支持,但與應(yīng)用無關(guān)的頻段中的噪聲。在振動監(jiān)控應(yīng)用中,這可能是一個帶通濾波器,它將隨機(jī)振動與可能指示機(jī)器壽命減損的特定頻譜特征分離開來。在傾斜傳感器中,這可能是一個簡單的低通濾波器,例如移動平均濾波器。這種情況下,時長是建立時間與濾波器輸出殘余噪聲之間的一個重要權(quán)衡因素。圖2顯示了ADXL355艾倫方差曲線的例子,它表示相對于產(chǎn)生測量的均值時間,測量的不確定性(噪聲)。
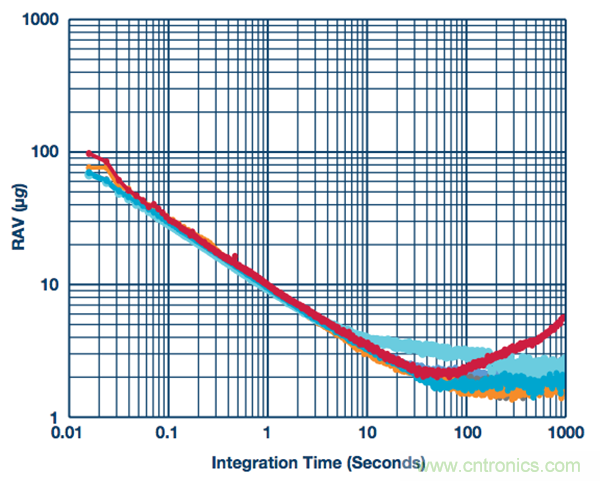
圖2. 艾倫方差曲線:ADXL355和ADXL362
校準(zhǔn)
校準(zhǔn)功能的作用是通過應(yīng)用校正公式來提高測量精度。在要求極高的應(yīng)用中,通常是在嚴(yán)格受控條件下進(jìn)行測量,通過直接觀測傳感器響應(yīng)來獲得此類校正公式。例如在傾斜傳感器應(yīng)用中,校準(zhǔn)過程涉及到觀測MEMS加速度計(jì)在多個不同方向上相對于重力的輸出。這種觀測的一般目標(biāo)是觀測傳感器對足夠多取向的響應(yīng),從而求解如下關(guān)系式(參見方程1)中所有12個校正系數(shù)(m11、m12、m13、m21、m22、m23、m31、m32、m33、bx、by、bz):
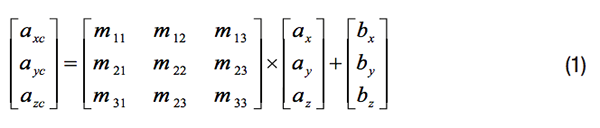
方程1中的校正系數(shù)用于處理偏置、靈敏度和對準(zhǔn)誤差。此公式還可以擴(kuò)展以包括更高階傳感器特性(非線性)或環(huán)境相關(guān)性(溫度、電源電平)。
數(shù)據(jù)處理
數(shù)據(jù)處理功能用于將校準(zhǔn)且濾波的傳感器數(shù)據(jù)轉(zhuǎn)換成適當(dāng)?shù)臏y量結(jié)果以對應(yīng)用提供最佳支持。在振動監(jiān)控系統(tǒng)中,這可能是簡單的RMS-DC轉(zhuǎn)換或帶頻譜報警的快速傅里葉變換(FFT)(參見ADIS16228)。在傾斜檢測應(yīng)用中,智能傳感器會利用方程2、方程3或方程4將傳感器對重力的加速度響應(yīng)轉(zhuǎn)換成方位角估計(jì)值。
這三個關(guān)系式分別代表使用一個、兩個和三個加速度計(jì)測量結(jié)果的傾斜估計(jì),假設(shè)各加速度計(jì)完全正交。
通信/存儲
通信/存儲功能支持所有物聯(lián)網(wǎng)云服務(wù)的數(shù)據(jù)分級和連接(加密/安全、存儲和分析)。
周期供電操作
電源管理(PM)功能對典型智能傳感器有三個作用。第一個作用是管理信號鏈中所有器件的上電時序要求。第二個作用是將電源供應(yīng)轉(zhuǎn)換成適當(dāng)?shù)碾妷簛碇С中盘栨溨兴衅骷淖顑?yōu)運(yùn)行。最后一個作用是在以一定時間間隔進(jìn)行測量的系統(tǒng)中,提供排程信號來觸發(fā)每次測量事件。
周期供電是識別智能傳感器節(jié)點(diǎn)中此類斷續(xù)操作的常見方法。在兩次測量事件之間,智能傳感器處于低功耗(或零功耗)狀態(tài),這種技術(shù)有助于節(jié)能。圖3顯示了一個采用此技術(shù)的智能傳感器在一個完整測量周期上的瞬時功耗。
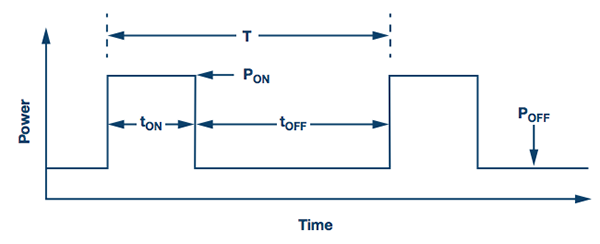
圖3. 基本周期供電圖
方程5提供了一個利用圖3所示運(yùn)行特性來估算平均功耗(PAV)的簡單關(guān)系式。

PON是智能傳感器節(jié)點(diǎn)執(zhí)行采樣并處理數(shù)據(jù)以產(chǎn)生和傳輸相關(guān)測量結(jié)果的平均功耗。
POFF是智能傳感器節(jié)點(diǎn)支持低功耗睡眠模式所需的平均功耗。
tON是智能傳感器開啟、產(chǎn)生測量結(jié)果、將該結(jié)果傳輸?shù)轿锫?lián)網(wǎng)云、然后關(guān)閉所需的時間。
tOFF是智能傳感器處于靜止?fàn)顟B(tài)(睡眠模式或完全關(guān)斷)的時間。
T為平均測量周期時間。
測量過程
在其開啟時間(tON)內(nèi),智能傳感器通常會經(jīng)歷多個不同運(yùn)行狀態(tài)。圖4和方程6顯示了一個示例序列,其將開啟時間分為四段:初始化、建立、處理和通信。
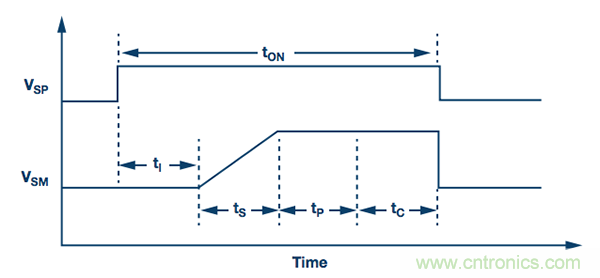
圖4. 智能傳感器測量周期序列
tI是初始化時間,代表從施加電源(VSP)到信號鏈中的各器件準(zhǔn)備好支持?jǐn)?shù)據(jù)采樣和處理的時間。
tS是建立時間,代表從第一個數(shù)據(jù)樣本到濾波器輸出(VSM)建立于足夠高的精度水平的時間。
tP是處理時間,代表從濾波器建立到產(chǎn)生測量結(jié)果所需的時間。這可能包括應(yīng)用校準(zhǔn)公式、專門的信號處理以及根據(jù)物聯(lián)網(wǎng)安全協(xié)議進(jìn)行數(shù)據(jù)加密的時間。
tC是通信時間,代表連接云服務(wù)、發(fā)送加密數(shù)據(jù)以及支持差錯校驗(yàn)或身份驗(yàn)證服務(wù)所需的時間。
建立時間影響
根據(jù)測量周期的階段劃分(圖4),很明顯,在濾波器建立時間這一段中,噪聲可能會影響周期供電的智能傳感器節(jié)點(diǎn)的功耗。一般而言,來自均值操作的噪聲幅度的降低量與均值時間的平方根成比例,而能耗的增加量與均值時間是直接比例關(guān)系。因此,噪聲幅度降低10倍會引起能耗(濾波建立期間)增加100倍!這種不成比例的權(quán)衡關(guān)系很快會對只需最少濾波(最低噪聲)的傳感器有利。
應(yīng)用示例
考慮圖5所示的微波天線平臺,其??吭谝粋€塔式平臺上。在此類通信系統(tǒng)中,數(shù)據(jù)鏈路的可靠性取決于指向角的精度。為了維持指向角,可能需要手動調(diào)整,特別是地震或其他原因擾動了天線所??康钠脚_之后。此類遠(yuǎn)程維護(hù)的成本高昂,而且不能及時響應(yīng),因此,作為維護(hù)響應(yīng)策略的一部分,一家天線運(yùn)營商正研究利用MEMS加速度計(jì)監(jiān)控天線方向變化的可行性。
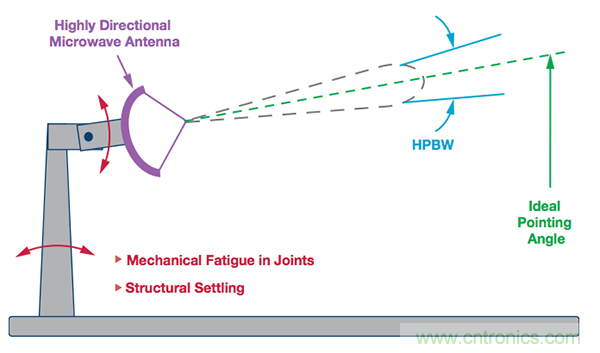
圖5. 微波天線平臺
系統(tǒng)架構(gòu)師根據(jù)最基本的功能要求開始了此次調(diào)研:維持各天線平臺的可靠通信。該系統(tǒng)中,可靠的數(shù)據(jù)通信要求天線指向角始終位于天線的半功率波束寬度(HPBW,參見圖5)以內(nèi)。因此,他們決定:如果天線在短時間內(nèi)的方向變化達(dá)到天線HPBW的25%,那么就觸發(fā)一次實(shí)地維護(hù)需求。
在支持此目標(biāo)的誤差預(yù)算內(nèi),架構(gòu)師允許傾斜測量的峰值噪聲為測量目標(biāo)(HPBW的25%)的10%。為簡明起見,架構(gòu)師還指定噪聲峰值等于噪聲均方根(rms)值的3倍。方程7反映了所有這些限定條件,并將其簡化為一個關(guān)系式,即傾斜測量中的噪聲必須小于HPBW/120。

方程8是該角度噪聲要求與MEMS加速度計(jì)的相同性能指標(biāo)的關(guān)系式,它是通過如下方式得來:將方程7的結(jié)果代入方程2中的加速度和傾斜角基本公式。

因此,若天線的HPBW為0.7°,則加速度計(jì)的噪聲必須小于100 μg才能達(dá)到現(xiàn)有標(biāo)準(zhǔn)。
為使測量實(shí)現(xiàn)100 μg的不確定度,可以利用這一結(jié)果作為指標(biāo)來確定各候選傳感器(表1)所需的均值時間量?;仡檲D2可知,ADXL355將需要約0.01秒(tS355 = 0.01,參見方程10)的均值時間才能達(dá)到要求。
對于ADXL362,可以做簡單的近似計(jì)算:因?yàn)槠湓肼暿茿DXL355的9倍,所以為了達(dá)到相同的目標(biāo),需要的均值時間將是ADXL355的81倍(tS362 = 81 x tS355,參見方程11)。方程10反映了來源于ADXL355建立時間的能耗,方程11反映了來源于ADXL362建立時間的能耗(參見表1)。
出乎意料的是,對于該噪聲性能水平,最低能耗來自最低噪聲的加速度計(jì),而不是來自最低功耗的加速度計(jì)。方程12將方程10和方程11中各傳感器的能耗估計(jì)值除以測量間隔(T = 10秒),得到建立時間對功耗的估計(jì)貢獻(xiàn)。
結(jié)論
本文揭示了一種特殊情況,即最低功耗解決方案是由噪聲最低的核心傳感器實(shí)現(xiàn)的,而不是由功耗最低的傳感器實(shí)現(xiàn)的。新興物聯(lián)網(wǎng)應(yīng)用對性能要求嚴(yán)苛,而可用能源則很有限;對于那些為此類應(yīng)用開發(fā)智能傳感器方案的人士來說,這種解決途徑可能是一個重要的啟示。事實(shí)上,愿意了解并挑戰(zhàn)哪怕是最根本的范式的人士,可能會獲得更巧妙的解決方案。有時候,同一傳感器既能提供最高性能,又具有最低功耗。
作者簡介
Mark Looney [mark.looney@analog.com]ADI公司(美國北卡羅來納州格林斯博羅)的iSensor®應(yīng)用工程師。自1998年加入ADI公司以來,他在傳感器信號處理、高速模數(shù)轉(zhuǎn)換器和DC-DC電源轉(zhuǎn)換領(lǐng)域積累了豐富的工作經(jīng)驗(yàn)。他擁有內(nèi)華達(dá)州大學(xué)雷諾分校電氣工程專業(yè)學(xué)士(1994年)和碩士(1995年)學(xué)位,并發(fā)表過數(shù)篇文章。加入ADI公司之前,他曾協(xié)助創(chuàng)立汽車電子和交通解決方案公司IMATS,還擔(dān)任過Interpoint公司的設(shè)計(jì)工程師。
本文轉(zhuǎn)載自ADI電機(jī)控制中文技術(shù)社區(qū)。
推薦閱讀:



