
【導讀】激光測距傳感器是先由激光二極管對準目標發(fā)射激光脈沖,經(jīng)目標反射后激光向各方向散射。部分散射光返回到傳感器接收器,被光學系統(tǒng)接收后成像到雪崩光電二極管上。雪崩光電二極管是一種內部具有放大功能的光學傳感器,因此它能檢測極其微弱的光信號。記錄并處理從光脈沖發(fā)出到返回被接收所經(jīng)歷的時間,即可測定目標距離。

激光傳感器必須極其精確地測定傳輸時間,因為光速太快。要分辨出3ps的時間,這是對電子技術提出的過高要求,實現(xiàn)起來造價太高。但是如今的激光傳感器巧妙地避開了這一障礙,利用一種簡單的統(tǒng)計學原理,即平均法則實現(xiàn)了1mm的分辨率,并且能保證響應速度。
遠距離激光測距儀在工作時向目標射出一束很細的激光,由光電元件接收目標反射的激光束,計時器測定激光束從發(fā)射到接收的時間,計算出從觀測者到目標的距離;LED白光測速儀成像在儀表內部集成電路芯片CCD上,CCD芯片性能穩(wěn)定,工作壽命長,且基本不受工作環(huán)境和溫度的影響。因此,LED白光測速儀測量精度有保證,性能穩(wěn)定可靠。

激光測距傳感器的應用
汽車防撞探測器:一般來說,大多數(shù)現(xiàn)有汽車碰撞預防系統(tǒng)的激光測距傳感器使用激光光束以不接觸方式用于識別汽車在前或者在后形勢的目標汽車之間的距離,當汽車間距小于預定安全距離時,汽車防碰撞系統(tǒng)對汽車進行緊急剎車,或者對司機發(fā)出報警,或者綜合目標汽車速度、車距、汽車制動距離、響應時間等對汽車行駛進行即時的判斷和響應,可以大量的減少行車事故。在高速公路上使用,其優(yōu)點更加明顯。
車流量監(jiān)控:使用方式一般固定到高速或者重要路口的龍門架上,激光發(fā)射和接收垂直地面向下,對準一條車道的中間位置,當有車輛通行時,激光測距傳感器能實時輸出所測得的距離值的相對改變值,進而描繪出所測車的輪廓。這種測量方式一般使用測距范圍小于30米即可,且要求激光測距速率比較高,一般要求能達到100赫茲就可以了。這對于在重要路段監(jiān)控可以達到很好的效果,能夠區(qū)分各種車型,對車身高度掃描的采樣率可以達到10厘米一個點(在40Km/h時,采樣率為11厘米一個點)。對車流限高,限長,車輛分型等都能實時分辨,并能快速輸出結果。

無人機:著機器人(Robot)、無人機(Drone)、無人搬運車、自動駕駛等新概念系統(tǒng)的興起,連帶刺激測距與避障(Obstacle Avoidance)技術需求。其中測距為避障的基礎,并有多種技術可以實現(xiàn)測距,包含無線射頻(Radio Frequency;RF)、超音波(Ultrasonic)、紅外線(Infrared)以及激光/雷射(Laser)等。這些技術各有其優(yōu)缺點,且成本也有差異性。
其中,紅外線與激光屬光電半導體技術,分別運用紅外線二極管(Infrared Light-Emitting Diode;IR LED)及激光二極管(Laser Diode;LD)的發(fā)波,而后接收回波來辨識物體的距離,紅外線技術適合短距離運用,激光技術則適合長距離范疇。另外,常見的避障技術還有無線射頻、超音波技術等,它們則常見于汽車領域應用。
激光雷達傳感器
激光雷達是汽車領域相對較新的應用系統(tǒng),但正愈來愈引起人們的注意。系統(tǒng)和半導體供應商們正專注于研發(fā)和改進新的解決方案,并計劃2020/2021年將樣件應用起來。
什么是LIDAR(激光雷達)?如前所說,它是利用激光進行探測和測距技術的簡稱。除了需要激光發(fā)射器,這一系統(tǒng)還需要有一個高精度的接收器。由于能通過獨特的方法提供被探測物體的三維影像,激光雷達主要被用于測量與固定或移動物體間的距離。
如今,任何買了激光測距儀的人都在用這種方法在家中、建筑材料商店等地方測量距離,其能測量的距離可達數(shù)米。而對于駕駛員輔助系統(tǒng),關鍵挑戰(zhàn)則在于保證系統(tǒng)在任何環(huán)境狀況下(溫度變化、陽光照射、黑暗中或雨雪天氣)都能正常工作,而且還要能辨認出300米以外的物體。當然,還需要能夠體積最小,可以在最低的成本下大規(guī)模生產(chǎn)。
激光雷達系統(tǒng)不是新興事物,也已經(jīng)在工業(yè)和軍事方面應用了很多年。但是,我們這里所說的是復雜的機械透鏡系統(tǒng),還要帶有360度無死角視線,能捕捉到物體的空間三維影像。如果還像工業(yè)和軍事上那樣售價成千上萬美元,那么將不可能被大規(guī)模運用在汽車領域。
如今,激光雷達系統(tǒng)有2個主要發(fā)展方向,紅外激光雷達系統(tǒng)加上微電機械系統(tǒng)(MEMS Micro-Electro-Mechanical System)(配上轉動的激光發(fā)射器),或者采用固定狀態(tài)的激光雷達系統(tǒng)。
在簡要地討論這些技術的區(qū)別以前,需要對接收系統(tǒng)解釋一下。
接收系統(tǒng)的主要功能是識別從發(fā)射器發(fā)出的和從物體上反射的光束。因此探測器需要非常靈敏,以至能夠探測到單個的光子。如今,最新的相關設備采用了SPAD(Single-Photon Avalanche Diode單光子雪崩二極管) 技術。
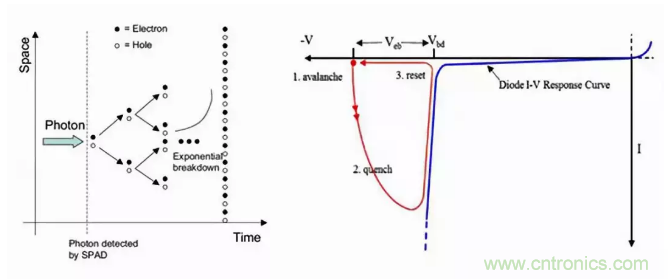
圖:SPAD 傳感器單元的原理
該技術的原理很簡單,如圖11所示。這個二極管有特殊的偏移PN結結構,所以單個的光子就能在二極管內造成雪崩電流(由一點小電流引發(fā)的大量電流,類似雪崩現(xiàn)象,故名)。快速增大的二極管電流會被相應的電路探測到,然后產(chǎn)生數(shù)字信號,用于后期處理。
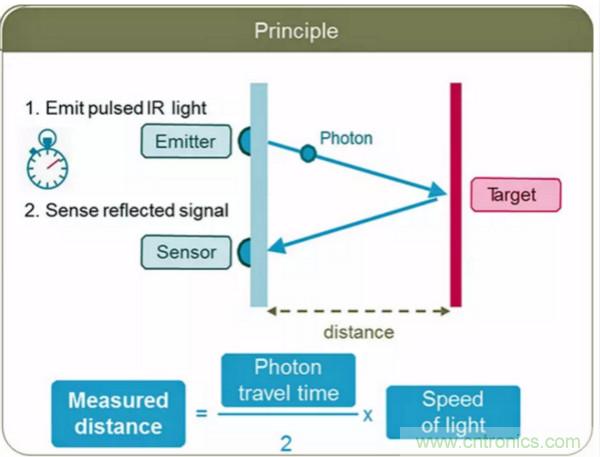
圖:激光雷達測距原理
圖12顯示的是采用SPAD傳感器測量距離的工作原理。在時間為X時,激光發(fā)射器發(fā)出一個脈沖光信號,這一信號會被物體反射回來,經(jīng)過Y時間后一個(或更多)光子到達傳感器,到該物體間的距離可以從光線傳播的時間長短計算出來。
如果一束或多束光線從轉動的鏡面或微型機械系統(tǒng)中發(fā)射出來,而又有一個由數(shù)個傳感器元件組成的陣列,那么三維立體的物體也能被探測出來。圖13和14就展示了兩種基本的激光探測系統(tǒng)的測量過程。
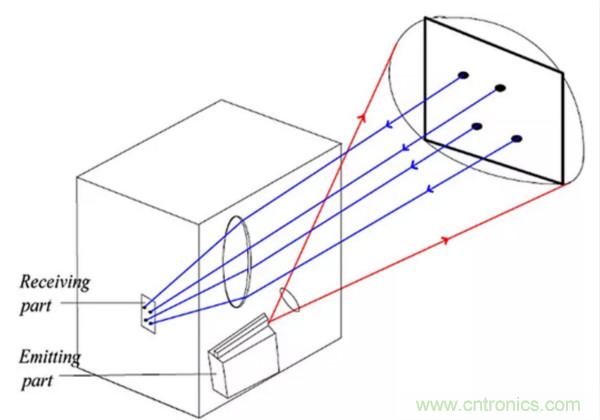
圖:固態(tài)激光雷達測距原理
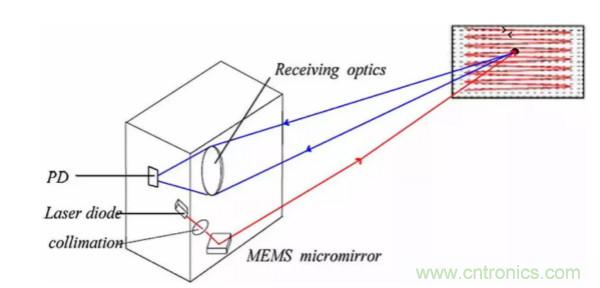
圖:基于MEMS的激光雷達測距原理
當采用基于MEMS技術的微型鏡面系統(tǒng)時,單一束的激光信號會以線形形式被發(fā)散和反射回來,反射的光子被相對應的SPAD元件中的光敏傳感器檢測到。這對于鏡面系統(tǒng)準確性、工作壽命、可調節(jié)度和可靠性有非常高的要求。畢竟這是一個內部帶有可動部件的系統(tǒng)。
乍一看上去,一個沒有可動零件的系統(tǒng)似乎更容易實現(xiàn)。但在這一系統(tǒng)中,需要數(shù)個(超過100個)激光二極管以及一個相對較大的接收器陣列。激光二極管必須能發(fā)出脈沖寬度在毫微秒級上的、電流達數(shù)個安培的信號能力,這對半導體制造商是很大的挑戰(zhàn)。
兩種系統(tǒng)都還在開發(fā)中。從一個半導體制造商的角度上來看,系統(tǒng)所需的半導體元件在技術上是可行的,但是SPAD陣列所需的空間面積不好實現(xiàn)。要想激活和控制激光二極管陣列,并實現(xiàn)大約100美元的目標成本,則需要新的方法。相應的微電機械系統(tǒng)也正在研發(fā)當中。
推薦閱讀:
