
【導讀】激光技術和激光器是二十世紀六十年代出現(xiàn)的最重大的科學技術之一。 激光技術與應用的迅猛發(fā)展,已與多個學科相結合,形成新興的交叉學科,如光電子學、信息光學、激光光譜學、非線性光學、超快激光學、量子光學、光纖光學、導波光學、激光醫(yī)學、激光生物學、激光化學等。 這些交叉技術與新的學科的出現(xiàn), 使得激光器的應用范圍擴展到幾乎國民經濟的所有領域。
激光傳感器原理
激光傳感器是利用激光技術進行測量的傳感器。它由激光器、激光檢測器和測量電路組成。激光傳感器是新型測量儀表,它的優(yōu)點是能實現(xiàn)無接觸遠距離測量,速度快,精度高,量程大,抗光、電干擾能力強等。

激光與普通光不同,需要用激光器產生。激光器的工作物質,在正常狀態(tài)下,多數(shù)原子處于穩(wěn)定的低能級E1,在適當頻率的外界光線的作用下,處于低能級的原子吸收光子能量激發(fā)而躍遷到高能級E2。光子能量E=E2-E1=hv,式中h 為普朗克常數(shù),v 為光子頻率。反之,在頻率為v 的光的誘發(fā)下,處于能級E2 的原子會躍遷到低能級釋放能量而發(fā)光,稱為受激輻射。激光器首先使工作物質的原子反常地多數(shù)處于高能級(即粒子數(shù)反轉分布),就能使受激輻射過程占優(yōu)勢,從而使頻率為v 的誘發(fā)光得到增強,并可通過平行的反射鏡形成雪崩式的放大作用而產生大的受激輻射光,簡稱激光。
激光具有3 個重要特性
(1)高方向性(即高定向性,光速發(fā)散角小),激光束在幾公里外的擴展范圍不過幾厘米。
(2)高單色性,激光的頻率寬度比普通光小10 倍以上。
(3)高亮度,利用激光束會聚最高可產生達幾百萬度的溫度。
兩種激光傳感器主要原理
利用激光的高方向性、高單色性和高亮度等特點可實現(xiàn)無接觸遠距離測量。激光傳感器常用于長度、距離、振動、速度、方位等物理量的測量,還可用于探傷和大氣污染物的監(jiān)測等。總之,激光傳感器的應用領域越來越廣泛了,下面介紹兩種激光傳感器主要原理和應用。
1 、激光位移傳感器
激光位移傳感器能夠利用激光的高方向性、高單色性和高亮度等特點可實現(xiàn)無接觸遠距離測量。激光位移傳感器(磁致伸縮位移傳感器)就是利用激光的這些優(yōu)點制成的新型測量儀表,它的出現(xiàn),使位移測量的精度、可靠性得到極大的提高,也為非接觸位移測量提供了有效的測量方法。
激光位移傳感器的兩種測量原理
(1)激光三角法測量原理
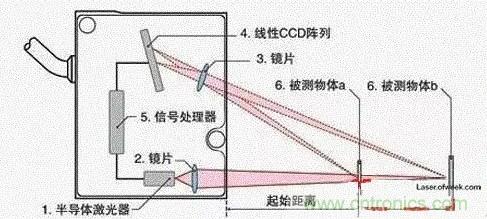
激光三角法測量原理圖
半導體激光器1被鏡片2聚焦到被測物體6。反射光被鏡片3收集,投射到CCD陣列4上;信號處理器5通過三角函數(shù)計算陣列4上的光點位置得到距物體的距離。
激光發(fā)射器通過鏡頭將可見紅色激光射向物體表面,經物體反射的激光通過接受器鏡頭,被內部的CCD線性相機接受,根據(jù)不同的距離,CCD線性相機可以在不同的角度下“看見”這個光點。根據(jù)這個角度即知的激光和相機之間的距離,數(shù)字信號處理器就能計算出傳感器和被測物之間的距離。
同時,光束在接收元件的位置通過模擬和數(shù)字電路處理,并通過微處理器分析,計算出相應的輸出值,并在用戶設定的模擬量窗口內,按比例輸出標準數(shù)據(jù)信號。如果使用開關量輸出,則在設定的窗口內導通,窗口之外截止。另外,模擬量與開關量輸出可設置獨立檢測窗口。
(2)激光回波分析法測量原理
激光位移傳感器采用回波分析原理來測量距離可以達到一定程度的精度。傳感器內部是由處理器單元、回波處理單元、激光發(fā)射器、激光接受器等部分組成。激光位移傳感器通過激光發(fā)射器每秒發(fā)射一百萬個脈沖到檢測物并返回至接收器,處理器計算激光脈沖遇到檢測物并返回接收器所需時間,以此計算出距離值,該輸出值是將上千次的測量結果進行的平均輸出。
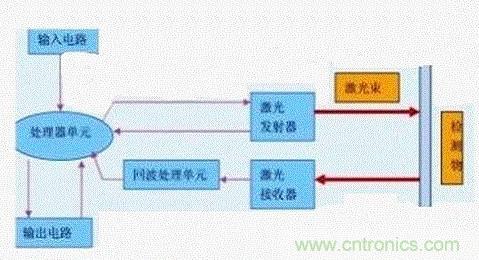
激光回波分析法測量原理圖
2、激光測距傳感器
激光測距傳感器的原理與無線雷達相同,將激光對準目標發(fā)射出去后,測量它的往返時間,再乘以光速既得到往返距離。由于激光具有高方向性、高單色性和高功率等優(yōu)點,這些對于測遠距離、判定目標方位、提高接受系統(tǒng)的性噪比、保證測量精度等都是很關鍵的,因此激光測距儀日益受到重視。
激光測距傳感器原理
激光測距實際上是一種主動光學探測方法。主動光學探測的探測機制是:由探測系統(tǒng)向目標發(fā)射波束(在光學探測中,一般是紅外或者可見光),波束被目標表面放射產生回波信號。回波信號中直接或簡介地包含待測信息。接收與信號處理系統(tǒng)通過接收和分析回波信號,獲得被測量。
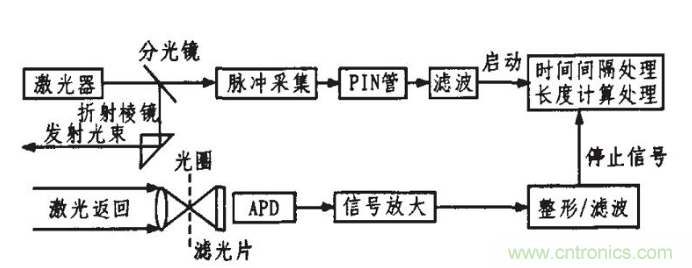
脈沖激光測距系統(tǒng)簡圖
其工作原理如下:人機操作發(fā)出測距指令,出發(fā)激光器發(fā)出激光脈沖,一小部分能量透過分束片,作為參考脈沖直接送到脈沖采集系統(tǒng),作為計時的起始點,啟動數(shù)字式測距計時器開始計時:另一部分由折射棱鏡放射,射向目標。一般發(fā)射前端有望遠光學系統(tǒng),為的是減少出射光束的發(fā)散角,以提高光能面密度,增大工作距離,還可以減少背景和周圍非目標標物的干擾。到達目標的激光束有一部分被表面漫反射回到測距儀;經接收物鏡和光學濾波器,到達探測器APD,窄帶光學濾波器的主要作用是充分利用激光優(yōu)良的單色性,提高系統(tǒng)的信噪比;光探測器APD將光學信號轉換為電信號,然后將電信號進行信號放大、濾波整形。整形后的回波信號關閉時間間隔處理模塊,使其停止計時。這樣,根據(jù)時間間隔處理的結果t即可計算出待測目標的距離L為:

式(1)中,c為光速。圖3中,濾光片和光圈可以減少背景及雜閃光的影響,降低探測器輸出信號中的背景噪聲。根據(jù)式(1),脈沖測距精度,可以表示為:

由式(2)可知,系統(tǒng)處理的時間間隔精度直接決定了脈沖激光測距系統(tǒng)的測距精度。
激光傳感器的獨特性
激光傳感器可用于其它技術無法應用的場合。例如,當目標很近時,計算來自目標反射光的普通光電傳感器也能完成大量的精密位置檢測任務。但是,當目標距離較遠內或目標顏色變化時,普通光電傳感器就難以應付了。
雖然先進的背景噪聲抑制傳感器和三角測量傳感器在目標顏色變化的情況下能較好地工作,但是,在目標角度不固定或目標太亮時,其性能的可預測性變差。此外,普通光電三角測量傳感器一般量程只限于0.5m 以內。超聲波傳感器雖然也經常用于檢測距離較遠的物體,而且由于它不是光學裝置,所以不受顏色變化的影響。但是,超聲波傳感器是依據(jù)聲速測量距離的,因此存在一些固有的缺點,不能用于以下場合。
1、待測目標與傳感器的換能器不相垂直的場合。
因為超聲波檢測的目標必須處于與傳感器垂直方位偏角不大于10°角以內。
2、需要光束直徑很小的場合。因為一般超聲波束在離開傳感器2m 遠時直徑為0.76cm。
3、需要可見光斑進行位置校準的場合。
4、多風的場合。
5、真空場合。
6、溫度梯度較大的場合遙因為這種情況下會造成聲速的變化。
7、需要快速響應的場合
而激光傳感器能解決上述所有場合的檢測。
激光傳感器在機械制造業(yè)中的應用
激光傳感器的作用主要包括激光測長、激光測距、激光測振、激光測速。利用激光的高方向性、高單色性和高亮度等特點可實現(xiàn)無接觸遠距離測量。激光傳感器常用于長度、距離、振動、速度、方位等物理量的測量,還可用于探傷和大氣污染物的監(jiān)測等。
激光測長
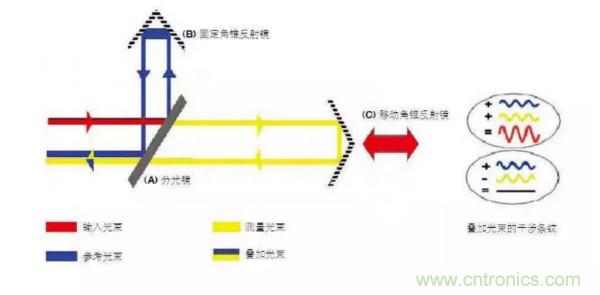
精密測量長度是精密機械制造工業(yè)和光學加工工業(yè)的關鍵技術之一?,F(xiàn)代長度計量多是利用光波的干涉現(xiàn)象來進行的,其精度主要取決于光的單色性的好壞。激光是最理想的光源,它比以往最好的單色光源還純10萬倍。因此激光測長的量程大、精度高。
激光測距
它的原理與無線電雷達相同,將激光對準目標發(fā)射出去后,測量它的往返時間,再乘以光速即得到往返距離。由于激光具有高方向性、高單色性和高功率等優(yōu)點,這些對于測遠距離、判定目標方位、提高接收系統(tǒng)的信噪比、保證測量精度等都是很關鍵的,因此激光測距儀日益受到重視。在激光測距儀基礎上發(fā)展起來的激光雷達不僅能測距,而且還可以測目標方位、運運速度和加速度等,已成功地用于人造衛(wèi)星的測距和跟蹤。

激光測振
它基于多普勒原理測量物體的振動速度。這種測振儀在測量時由光學部分將物體的振動轉換為相應的多普勒頻移,并由光檢測器將此頻移轉換為電信號,再由電路部分作適當處理后送往多普勒信號處理器將多普勒頻移信號變換為與振動速度相對應的電信號,最后記錄于磁帶。它的優(yōu)點是使用方便,不需要固定參考系,不影響物體本身的振動,測量頻率范圍寬、精度高、動態(tài)范圍大。缺點是測量過程受其他雜散光的影響較大。
激光測速
它也是基多普勒原理的一種激光測速方法,用得較多的是激光多普勒流速計(見激光流量計),它可以測量風洞氣流速度、火箭燃料流速、飛行器噴射氣流流速、大氣風速和化學反應中粒子的大小及匯聚速度等。
激光與普通光源相比,有很多普通光源所無法替代的優(yōu)點,但激光需要用激光器產生,技術要求比較高。 大力發(fā)展激光傳感技術有利于國家在科技、經濟、以及國防等多個領域獨領風騷。
推薦閱讀:

