
【導(dǎo)讀】本文主要參考了TIDA-010031參考設(shè)計(jì),分析下ADC采樣積分方波無感控制的原理,方便大家更好地完成類似的方案設(shè)計(jì)。下面是典型的三相BLDC電機(jī)控制框圖:
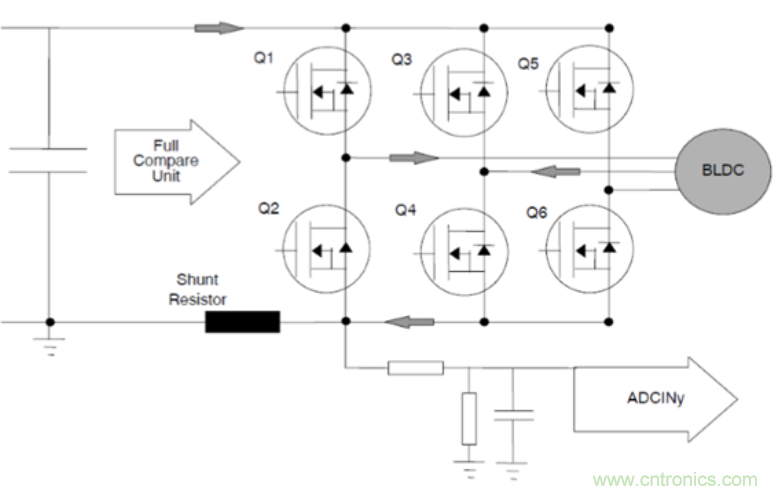
1.下面是典型的三相BLDC電機(jī)控制框圖.
三個(gè)半橋驅(qū)動BLDC無刷電機(jī),檢測低邊總線電流
2.典型的BLDC電機(jī)相電流和反電動勢波形圖分析
從波形上看,每60度電角度,只有兩個(gè)半橋有驅(qū)動電壓輸出,另外一個(gè)半橋上下管全關(guān),這個(gè)相電壓是懸浮態(tài)。
BLDC電機(jī)運(yùn)行后,相線都有反電動勢。
電機(jī)反電動勢來源于電機(jī)轉(zhuǎn)子旋轉(zhuǎn)引起磁通的變化,而磁通的變化在定子繞組上會產(chǎn)生感應(yīng)電壓。
對同一個(gè)電機(jī)來說,反電動勢峰值跟電機(jī)轉(zhuǎn)速幾乎是固定的比例。

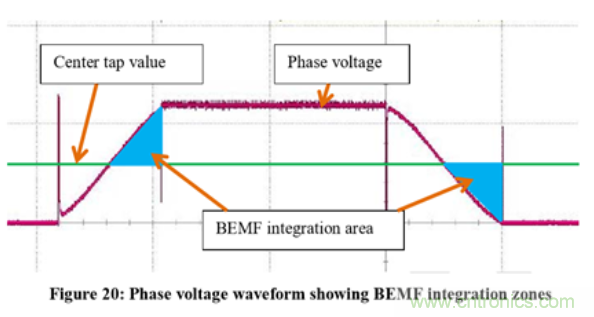
3.反電動勢過零點(diǎn)到峰值的反電動勢電壓和時(shí)間的積分
根據(jù)上面對反電動勢峰值跟轉(zhuǎn)速(電頻率)幾乎成固定比例的描述,設(shè)定 。Vm為反電動勢峰值, 對于同一個(gè)電機(jī),我們可以認(rèn)為Kv幾乎不變。
。Vm為反電動勢峰值, 對于同一個(gè)電機(jī),我們可以認(rèn)為Kv幾乎不變。
以上圖左邊的藍(lán)色區(qū)域?yàn)槔?,該區(qū)域(反電動勢過零點(diǎn)時(shí)刻到下一次換相點(diǎn)時(shí)刻之間的區(qū)域)的電角度是30度,也就是電角度(360度)的1/12。
設(shè)當(dāng)前電機(jī)電頻率為f, 單位為Hz。
反電動勢的峰值電壓為 ,單位為伏特。
,單位為伏特。
設(shè)反電動勢從center tap value到最大值的時(shí)間為t1, 而 。
。
那么藍(lán)色積分區(qū)域的積分值就等于藍(lán)色三角形的面積:

可以看到,積分結(jié)果是Kv值的 ,因此積分結(jié)果也是幾乎不變的。
,因此積分結(jié)果也是幾乎不變的。
所以我們可以根據(jù)積分的值跟固定閾值 作比較來判斷換相點(diǎn)。
作比較來判斷換相點(diǎn)。
4.ADC如何采樣反電動勢
方波無感BLDC的ADC采樣積分控制,電路設(shè)計(jì)有三相相電壓ADC采樣電路,每60度電角度區(qū)間電機(jī)的兩相由于半橋有輸入電壓同時(shí)有電感電流,在不增加額外電路的情況下很難獲得反電動勢電壓,而懸浮相由于沒有半橋電壓輸入和電感電流,所以可以從檢測該相端電壓推導(dǎo)出該相實(shí)際的反電動勢電壓,具體可以看下面的推導(dǎo),推導(dǎo)過程參考了TI的參考設(shè)計(jì)TIDA-010031 http://www.ti.com/lit/ug/tiduej4/tiduej4.pdf?ts=1588819919326
所以如果對這個(gè)電機(jī)控制方法感興趣的,可以在TI官網(wǎng)上查看該參考設(shè)計(jì)的軟硬件開發(fā)資料。
設(shè)計(jì)上采用下管常開,上管打PWM的策略驅(qū)動電機(jī)。考慮到電機(jī)驅(qū)動的PWM duty的大小是變化的,可以根據(jù)半橋上管ON的時(shí)間長短來決定采樣策略,因?yàn)槿绻瞎軐?dǎo)通時(shí)間太短,為了避開MOSFET開通關(guān)斷的影響,留給采樣的時(shí)間就變得很少,不利于采樣的準(zhǔn)確性.
● 在上管ON的時(shí)間比較長時(shí),在上管ON時(shí)遠(yuǎn)離MOSFET開關(guān)時(shí)刻檢測懸浮相的反電動勢電壓(一般在ON時(shí)間的正中間進(jìn)行采樣)。
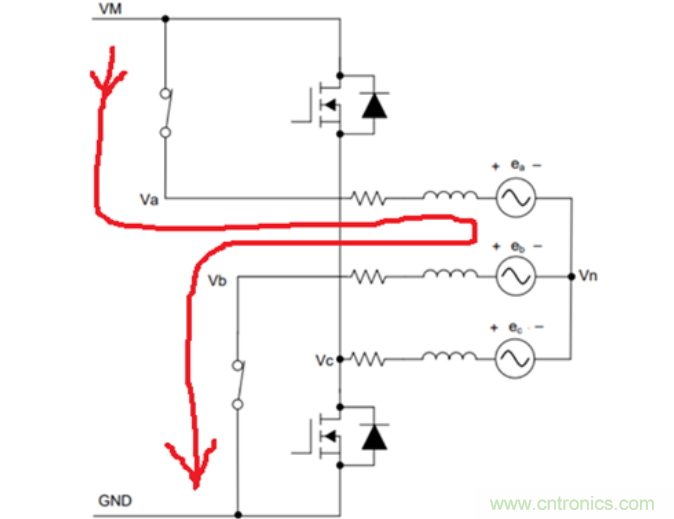
此時(shí)的驅(qū)動邏輯是A相上管導(dǎo)通,B相下管導(dǎo)通, 所以有 。
。
Ea, Eb, Ec為電機(jī)三相反電動勢電壓,va, vb, vc為三相半橋中點(diǎn)電壓,也就是電機(jī)三相輸入電壓。
La, Lb, Lc為電機(jī)三相相電感,ia, ib,ic為電機(jī)三相輸入電流,Ra, Rb, Rc為電機(jī)三相輸入電阻(考慮三相電阻相等), vn為電機(jī)三相中點(diǎn)電壓。

可以得到當(dāng)Ec=0,也就是反電動勢過零時(shí), , 也就是說當(dāng)ADC檢測到
, 也就是說當(dāng)ADC檢測到 時(shí),就意味著這個(gè)時(shí)刻是C相的反電動勢過零點(diǎn), 那么理論上再經(jīng)過1/12 的電周期時(shí)間,電機(jī)就需要進(jìn)行換向.
時(shí),就意味著這個(gè)時(shí)刻是C相的反電動勢過零點(diǎn), 那么理論上再經(jīng)過1/12 的電周期時(shí)間,電機(jī)就需要進(jìn)行換向.
● 上管ON的時(shí)間比較短時(shí),在上管OFF時(shí)檢測懸浮相的反電動勢電壓(一般在OFF時(shí)間的正中間進(jìn)行采樣)
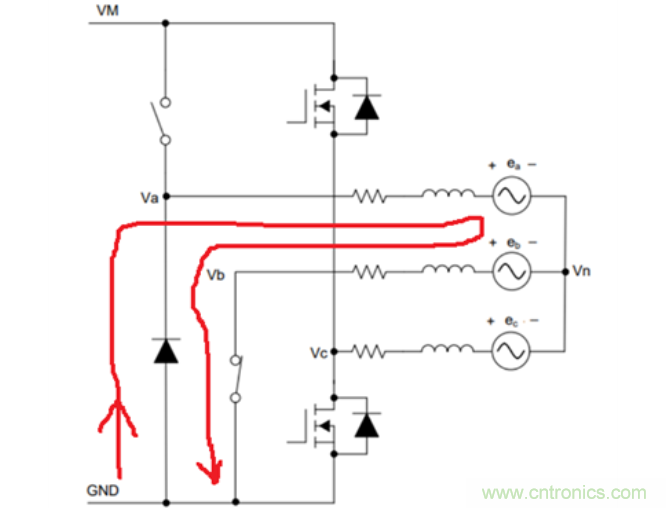
此時(shí)的驅(qū)動邏輯是A相上管關(guān)閉,B相下管仍導(dǎo)通,此時(shí)A相下管MOSFET體二極管續(xù)流,所以有 。
。

得到當(dāng)Ec=0,也就是反電動勢過零時(shí),vc=0, 也就是說當(dāng)ADC檢測到vc=0時(shí),就意味著這個(gè)時(shí)刻是C相的反電動勢過零點(diǎn), 那么理論上再經(jīng)過1/12的電周期時(shí)間,電機(jī)就需要進(jìn)行換向.
從上面的分析,我們可以看到,使用ADC采樣積分方式進(jìn)行無感BLDC控制,設(shè)計(jì)上需要注意以下兩點(diǎn)
1. 積分閾值跟電機(jī)的反電動勢峰值和轉(zhuǎn)速比值相關(guān),可能會隨著電機(jī)不同而不同,需要針對電機(jī)進(jìn)行調(diào)整。
2. 上管做PWM驅(qū)動的設(shè)計(jì)下, 可以采用不同的ADC采樣策略來針對大duty和小duty的情況,同時(shí)反電動勢過零點(diǎn)的判斷也需要調(diào)整
3. 電機(jī)高速情況下,電頻率相對比較高,而ADC積分采樣基于PWM開關(guān)周期采樣的,所以要獲得比較準(zhǔn)確的換相點(diǎn),需要比較高的開關(guān)頻率,如果開關(guān)頻率比較低,意味著采樣速率慢,可能會造成換相延遲比較大,從而影響電機(jī)的正??刂?。
推薦閱讀:

