
【導(dǎo)讀】近年來,毫米波雷達(dá)技術(shù)愈益成熟。前面在工業(yè)領(lǐng)域,主要介紹了道閘雷達(dá)的應(yīng)用;而在汽車領(lǐng)域,主要的雷達(dá)應(yīng)用可以大致分為兩大類:角雷達(dá)(Corner Radars)和前向雷達(dá)(Front Radars)。
角雷達(dá)(包括前向角雷達(dá)和后向角雷達(dá))通常是短距離雷達(dá),可滿足盲區(qū)檢測(cè)(BSD),變道輔助(LCA)和前后交通警報(bào)(F / RCTA)的要求;而前向雷達(dá)主要是用于自主緊急制動(dòng)(AEB)和自適應(yīng)巡航控制(ACC)的中遠(yuǎn)程雷達(dá)應(yīng)用。
傳統(tǒng)的角雷達(dá)主要是基于24GHz技術(shù),但由于新興的法規(guī)要求,并且需要更高的帶寬,更小的尺寸以及更高的性能,角雷達(dá)正逐步向77 GHz頻帶轉(zhuǎn)移。
本章節(jié)將會(huì)基于AWR1642介紹適用于角雷達(dá)的短程雷達(dá)解決方案。由于系統(tǒng)的框圖跟之前的道閘雷達(dá)大同小異,主要的區(qū)別在于三點(diǎn),一是雷達(dá)芯片使用的是AWR1642;二是接口芯片為汽車常用的CAN接口;三是為了讓RF供電的電源軌更加干凈,后面再用了一級(jí)LDO進(jìn)行濾波之后再為車載的雷達(dá)芯片供電。
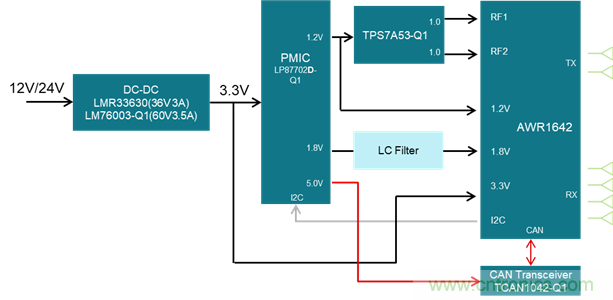
圖- 1 角雷達(dá)應(yīng)用的系統(tǒng)框圖
下面將會(huì)圍繞著AWR1642進(jìn)行詳細(xì)的展開。
AWR1642的高層次架構(gòu)
AWR1642是高度集成的單芯片77 GHz毫米波雷達(dá),其中包括兩個(gè)發(fā)射端和四個(gè)接收端,一個(gè)600 MHz可編程的C674x DSP以及一個(gè)200 M Hz可編程的ARM Cortex-R4F處理器。該器件支持RF帶寬,覆蓋76-77 GHz和77-81 GHz頻段。如圖2所示,該器件包括四個(gè)主要模塊:射頻/模擬前端子系統(tǒng),BIST子系統(tǒng),DSP子系統(tǒng)和主控子系統(tǒng)。
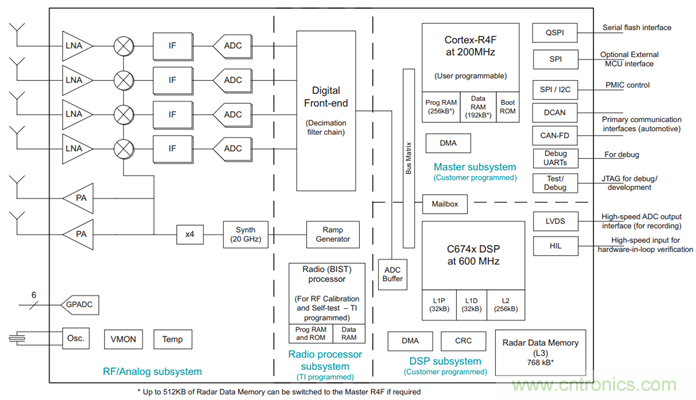
圖- 2 AWR1642的高層次架構(gòu)
● 射頻/模擬前端子系統(tǒng),包括射頻和模擬電路:合成器,功率放大器(PAS),低噪聲放大器(LNA),混頻器,中頻(IF)鏈路和模數(shù)轉(zhuǎn)換器轉(zhuǎn)換器(ADC)。該子系統(tǒng)還包括晶振,溫度傳感器、電壓監(jiān)視器和通用ADC。AWR1642器件使用一種復(fù)雜的基帶架構(gòu),可以提供同相(I通道)和正交(Q通道)輸出。
● 內(nèi)建自測(cè)試子系統(tǒng),又稱為BIST子系統(tǒng),包括數(shù)字前端,斜坡發(fā)生器和一個(gè)用于控制和配置低級(jí)射頻模擬電路以及斜坡發(fā)生器的寄存器的內(nèi)部處理器。(注意:該處理器是TI編程的,可以滿足RF校準(zhǔn)需求和BIST /監(jiān)視功能,但它不能直接提供給用戶使用。)數(shù)字前端負(fù)責(zé)濾波和抽取原始ADC輸出,并以可編程的采樣率提供最終的ADC數(shù)據(jù)采樣。
● DSP子系統(tǒng)包括一個(gè)時(shí)鐘頻率為600 MHz的TI C674x DSP ,用于雷達(dá)信號(hào)處理,通常是處理原始的ADC數(shù)據(jù)。該DSP是用戶可編程的,并且在使用時(shí)具有完全的靈活性。
● 主控子系統(tǒng)包括主頻為200MHz的ARM的車規(guī)級(jí)Cortex-R4F處理器,這是用戶可編程的。該處理器控制器件的整體操作,處理通信接口,并且實(shí)現(xiàn)更高層的算法,例如目標(biāo)分類和追蹤。該處理器還可以運(yùn)行AUTOSAR系統(tǒng)。
AWR1642可用于短距離雷達(dá)(SRR)應(yīng)用。該器件包括一個(gè)QSPI接口,可以直接從串行閃存下載用戶代碼;并且還包含了CAN-FD和CAN接口,因此可以與車輛CAN總線或?qū)S肅AN總線上的其他傳感器直接通信;還可以使用SPI /I2C接口控制PMIC。
AWR1642 的可用總內(nèi)存為1.5 MB。它支持在R4F program RAM,R4F data RAM,DSP L1和L2內(nèi)存以及radar data 內(nèi)存(L3內(nèi)存)之間進(jìn)行分區(qū)。表1列出了一些示例內(nèi)存配置。
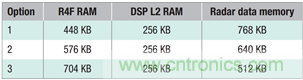
表- 1內(nèi)存配置示例
● DSP子系統(tǒng)中的L2內(nèi)存為256 KB,通常用于DSP應(yīng)用的指令和即時(shí)數(shù)據(jù)。DSP子系統(tǒng)還包括32 KB的L1內(nèi)存和data RAM,它們可以全部或部分配置為高速緩存。
● R4F具有448 KB的專用內(nèi)存,該內(nèi)存在R4F緊密耦合的內(nèi)存接口TCMA (256 KB)和TCMB(192 KB)之間分配。盡管完整的448 KB內(nèi)存沒有設(shè)置并且可用于指令或數(shù)據(jù),但典型的應(yīng)用程序會(huì)將TCMA用作指令存儲(chǔ)器,并將TCMB用作數(shù)據(jù)存儲(chǔ)器。
● 剩余的768 KB是L3內(nèi)存,可用作雷達(dá)數(shù)據(jù)立體內(nèi)存。還能以128 KB的增量為R4F共享多達(dá)512 KB的L3內(nèi)存。
DSP優(yōu)勢(shì)
AWR1642的關(guān)鍵優(yōu)勢(shì)之一是其內(nèi)置的C674x DSP。調(diào)頻連續(xù)波(FMCW)雷達(dá)技術(shù)在過去幾年中取得了長(zhǎng)足的發(fā)展。雷達(dá)在當(dāng)前的車輛中扮演著更重要的角色,不僅是駕駛員的舒適度方面,還有安全方面。這些應(yīng)用還使雷達(dá)在空間分辨率,速度分辨率以及目標(biāo)檢測(cè)和分類方面的性能要求更加嚴(yán)格。
AWR1642中完全可編程的DSP可以使客戶能夠?qū)嵤S兴惴ú?gòu)建創(chuàng)新的解決方案,以解決雷達(dá)性能方面的難題。 圍繞算法的研究不斷進(jìn)步,可以提高幾個(gè)關(guān)鍵領(lǐng)域的性能,例如:
● 緩解干擾:隨著越來越多的車輛采用雷達(dá)技術(shù),雷達(dá)之間的干擾問題變得越來越嚴(yán)重。在這種情況下,用于檢測(cè)和緩解干擾的創(chuàng)新算法是研究和信號(hào)處理算法開發(fā)的活躍領(lǐng)域。
● 改進(jìn)檢測(cè)算法:雷達(dá)的新興應(yīng)用,包括全自動(dòng)駕駛的終極視野,因此需要與目標(biāo)檢測(cè),地面雜波去除和最小化錯(cuò)誤檢測(cè)相關(guān)的改進(jìn)算法,以確保穩(wěn)定性。
● 高分辨率角度估計(jì):與雷達(dá)相關(guān)的主要挑戰(zhàn)之一是受限的角度分辨率。超越傳統(tǒng)波束成形的幾種先進(jìn)的角度估計(jì)算法可以改善角度分辨率,其中包括通過旋轉(zhuǎn)不變技術(shù)(ESPIRIT)進(jìn)行信號(hào)分類(MUSIC)和信號(hào)參數(shù)估計(jì)。
● 聚類和目標(biāo)分類算法:這是研究和算法開發(fā)的另一個(gè)活躍領(lǐng)域,尤其是需要使用高分辨率的雷達(dá)點(diǎn)云和使用微多普勒技術(shù)識(shí)別行人的目標(biāo)分類算法。
為了滿足這些需求,內(nèi)置的DSP實(shí)現(xiàn)了高性能和完全可編程的信號(hào)處理能力。 表2提供了一些典型雷達(dá)信號(hào)處理例程中DSP性能的基準(zhǔn)數(shù)據(jù)。
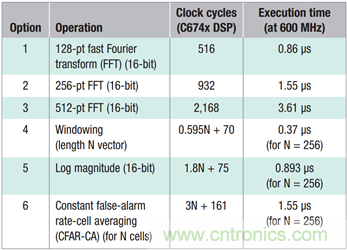
表- 2常見雷達(dá)信號(hào)處理例程的基準(zhǔn)數(shù)據(jù)
加密安全
AWR1642 提供了安全的啟動(dòng)機(jī)制。安全啟動(dòng)是一種安全性使能程序,它提供了機(jī)制來幫助將代碼算法保持在加密形式并幫助防止未經(jīng)授權(quán)的訪問。而且,它有助于避免將流氓代碼植入到設(shè)備上,從而防止設(shè)備運(yùn)行更改后的代碼/功能。
為了加快計(jì)算量大的編碼和解碼過程,AWR1642配備了基于硬件的加速器安全功能,應(yīng)用程序也可以使用這些功能來實(shí)現(xiàn)額外的安全性。
● 高級(jí)加密標(biāo)準(zhǔn)(AES)。
● 安全哈希加速器(SHA2)。
● 真隨機(jī)數(shù)生成器(TRNG)。
● 公鑰加速器(PKA)。
此外,AWR1642提供了一種安全的調(diào)試機(jī)制,使調(diào)試過程輕松自如,同時(shí)幫助保護(hù)器件免受各種威脅。
安全
AWR1642是TI SafeTI ™設(shè)計(jì)套件的一部分,可幫助開發(fā)人員在其應(yīng)用中實(shí)現(xiàn)ISO26262 ASILB等級(jí)的功能安全。
AWR1642遵循一個(gè)稱為“安全島”的概念,該概念涉及硬件診斷的應(yīng)用程序和軟件診斷之間的平衡,以幫助管理功能安全。上電時(shí)它會(huì)全面測(cè)試一組核心元素,并對(duì)其進(jìn)行密切監(jiān)控,以幫助提供正確的軟件執(zhí)行。 此核心元素集包括電源、時(shí)鐘、復(fù)位、R4F處理器、以及關(guān)聯(lián)的程序和數(shù)據(jù)存儲(chǔ)器,以幫助執(zhí)行軟件,從而在其他元素(例如外圍設(shè)備)上能實(shí)現(xiàn)基于軟件的診斷。
該器件還包括先進(jìn)的內(nèi)置電路,用于監(jiān)控RF和模擬前端電路,運(yùn)行TI固件的專用處理器(延遲鎖定步驟)內(nèi)核有助于簡(jiǎn)化應(yīng)用程序開發(fā),并且完全可以使DSP和MCU每秒從任何種類的雷達(dá)前端監(jiān)控中獲取百萬條指令(MIPS)。
AWR1642傳感器支持以下前端診斷功能:
● 合成器線性調(diào)頻監(jiān)視器。
● TX輸出功率監(jiān)視器。
● 基于射頻環(huán)回的噪聲系數(shù),增益不平衡和相位不平衡監(jiān)視器。
● RX飽和度監(jiān)視器。
● 基于IF回送的IF放大器(IFA)抖動(dòng)衰減監(jiān)視器。
● Ball-break監(jiān)控器。
● 溫度傳感器。
其他關(guān)鍵診斷功能包括用于中央處理器(CPU)內(nèi)核的邏輯BIST,用于所有存儲(chǔ)器的存儲(chǔ)器BIST,用于每個(gè)處理器的窗口式看門狗,端到端糾錯(cuò)碼,存儲(chǔ)器保護(hù)單元,時(shí)鐘和電源監(jiān)視器,復(fù)位時(shí)的故障波動(dòng) ,以及錯(cuò)誤信號(hào)發(fā)送模塊。
這些功能有助于使開發(fā)人員更輕松,更快速地實(shí)現(xiàn)ASIL-B功能安全性。對(duì)安全至關(guān)重要的開發(fā)需要管理系統(tǒng)性故障和隨機(jī)性故障。 TI為安全關(guān)鍵型半導(dǎo)體創(chuàng)建了獨(dú)特的開發(fā)流程,定制了ISO 26262:2011的功能安全生命周期,以最有效地滿足非安全環(huán)境(SEooC)的需求。 此開發(fā)過程已通過獨(dú)立第三方審核員TÜVSÜD的認(rèn)證。
AWR1642用例
AWR1642是用于短程汽車市場(chǎng)雷達(dá)應(yīng)用的radar-on-chip。以一個(gè)多模式的使用示例為例,短距離雷達(dá)(SRR)的范圍為80 m,超短距離雷達(dá)(USRR)的范圍為20 m;配置可參考表3 。

*使用速度歧義度解析技術(shù)可以提高實(shí)際最大速度。
表- 3 多模SRR示例的線性調(diào)頻配置示例
表3中的示例使用512 KB雷達(dá)數(shù)據(jù)立方體內(nèi)存,并通過八個(gè)虛擬天線(兩個(gè)TX,四個(gè)RX)實(shí)現(xiàn)了80 m的范圍。其他變化也有可能實(shí)現(xiàn)不同的系統(tǒng)性能指標(biāo)。
下圖3描繪了在25 m和40 m處兩點(diǎn)物體的模擬情況下,具有80 m線性調(diào)頻配置的雷達(dá)圖像。 圖3的左側(cè)描述了目標(biāo)的范圍和相對(duì)速度,而右側(cè)則顯示了目標(biāo)的范圍和相對(duì)速度。

圖- 3 兩點(diǎn)目標(biāo)模擬情況的雷達(dá)二維FFT圖像
與24GHz相比,在BSD等應(yīng)用中使用76–81GHz可以實(shí)現(xiàn)高范圍分辨率(可能達(dá)到4 cm的分辨率)和更高的速度分辨率(這對(duì)于停車輔助應(yīng)用很重要) ,而且還可以減小天線的外形尺寸,這是一個(gè)明顯的優(yōu)勢(shì)。
R4F處理器具有704 KB的可用內(nèi)存,可用于高層算法,例如群集和跟蹤,以及控制和主機(jī)接口功能(包括AUTOSAR,這是獨(dú)立傳感器實(shí)現(xiàn)通常需要的)。開發(fā)人員還可以考慮在DSP中實(shí)現(xiàn)諸如群集和跟蹤之類的更高層算法。
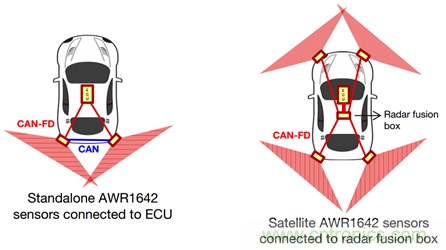
圖- 4 使用AWR1642 mmWave傳感器的角雷達(dá)系統(tǒng)拓?fù)?/div>
圖4為將AWR1642安裝在車輛四個(gè)角落的角雷達(dá)系統(tǒng)拓?fù)洌⑶覍⒃紮z測(cè)到的物體饋送到雷達(dá)融合盒子的情況。在這種拓?fù)浣Y(jié)構(gòu)中,四個(gè)角雷達(dá)執(zhí)行1-D,2-D FFT,檢測(cè)和角度估計(jì)處理,并通過CAN-FD接口將原始檢測(cè)到的物體發(fā)送到中央雷達(dá)融合盒子。 第二個(gè)CAN接口的可用性還使傳感器能夠通過專用CAN總線同時(shí)與其他傳感器通信。
綜上所述, AWR1642 mmWave不僅便于研發(fā)人員設(shè)計(jì),其優(yōu)勢(shì)也顯而易見:
● 提供了76-81GHz的更寬的RF帶寬,更高線性的chirps,更快的上升速度(高達(dá)100 MHz / µs)和片上BIST功能,便于安全監(jiān)控。
● 通過集成DSP,AWR1642傳感器使創(chuàng)新算法能夠應(yīng)對(duì)干擾和對(duì)物體進(jìn)行強(qiáng)大檢測(cè)的新挑戰(zhàn)。
以上優(yōu)勢(shì),使得AWR1642可以廣泛應(yīng)用于BSD盲區(qū)檢測(cè),為客戶在兼顧高性價(jià)比的同時(shí),也能提供高性能的解決方案。
推薦閱讀:
