
【導(dǎo)讀】在虛擬現(xiàn)實(shí)中,如何做到六自由度跟蹤?我們都知道傳統(tǒng)的慣性傳感器是無法做到這一點(diǎn)的,最多只能跟蹤頭部的轉(zhuǎn)動(dòng);想要跟蹤頭部的位移,就要引入光學(xué)系統(tǒng)了。
傳統(tǒng)的光學(xué)系統(tǒng)是攝像頭式的,攝像頭跟蹤頭顯上標(biāo)記的馬克點(diǎn)實(shí)現(xiàn)跟蹤,Oculus的Constellation系統(tǒng)就使用了攝像頭+紅外主動(dòng)馬克點(diǎn)的方式;而HTCVive則使用了一套十分巧妙的技術(shù),稱之為Lighthouse,這套技術(shù)由Valve開發(fā),可以說是目前體驗(yàn)最好的VR光學(xué)跟蹤方案。
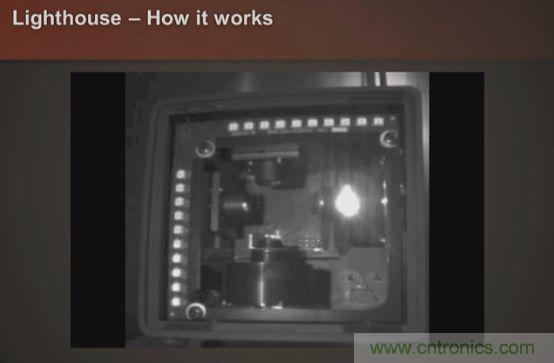
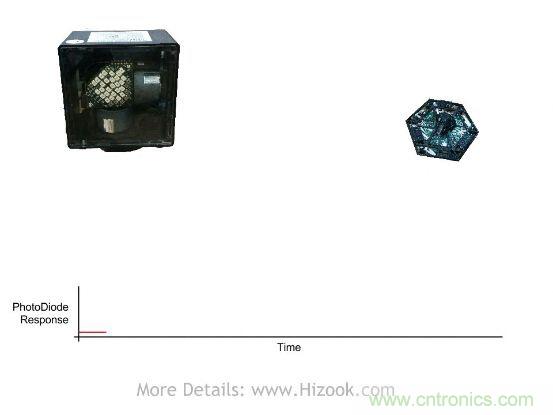
Lighthouse由兩個(gè)基站構(gòu)成:每個(gè)基站里有一個(gè)紅外LED陣列,兩個(gè)轉(zhuǎn)軸互相垂直的旋轉(zhuǎn)的紅外激光發(fā)射器。轉(zhuǎn)速為10ms一圈。基站的工作狀態(tài)是這樣的:20ms為一個(gè)循環(huán),在循環(huán)開始的時(shí)候紅外LED閃光,10ms內(nèi)X軸的旋轉(zhuǎn)激光掃過整個(gè)空間,Y軸不發(fā)光;下10ms內(nèi)Y軸的旋轉(zhuǎn)激光掃過整個(gè)空間,X軸不發(fā)光。

Valve在頭顯和控制器上安裝了很多光敏傳感器。
在基站的LED閃光之后就會(huì)同步信號,然后光敏傳感器可以測量出X軸激光和Y軸激光分別到達(dá)傳感器的時(shí)間。這個(gè)時(shí)間就正好是X軸和Y軸激光轉(zhuǎn)到這個(gè)特定的,點(diǎn)亮傳感器的角度的時(shí)間,于是傳感器相對于基站的X軸和Y軸角度也就已知了;分布在頭顯和控制器上的光敏傳感器的位置也是已知的,于是通過各個(gè)傳感器的位置差,就可以計(jì)算出頭顯的位置和運(yùn)動(dòng)軌跡。
這個(gè)系統(tǒng)有很多優(yōu)勢。
第一條是其需要的計(jì)算能力非常小。
一個(gè)光學(xué)系統(tǒng)需要進(jìn)行成像,然后程序就需要通過圖像處理的方法來將成像中的馬克點(diǎn)分辨出來。成像的細(xì)節(jié)越豐富,需要的圖像處理計(jì)算能力就越高。所以紅外攝像頭比單色攝像頭簡單,單色攝像頭比彩色攝像頭簡單。Lighthouse使用的僅僅是時(shí)間參數(shù),那么它就不涉及到圖像處理,對于位置的計(jì)算在設(shè)備本地就可以完成。

第二個(gè)優(yōu)點(diǎn)是其延遲也很小。
計(jì)算能力需求高就意味著延遲會(huì)高:圖形處理的大量數(shù)據(jù)要從攝像頭傳輸?shù)诫娔X中,再從電腦傳輸?shù)筋^顯上,就會(huì)增加延遲。而Lighthouse可以直接將位置數(shù)據(jù)傳輸?shù)诫娔X上,省略了從攝像頭到電腦的高數(shù)據(jù)傳輸?shù)牟襟E。
第三,是系統(tǒng)中的追蹤物體的數(shù)量理論上沒有上限。
如果是光學(xué)攝像頭的話,系統(tǒng)內(nèi)的跟蹤馬克點(diǎn)數(shù)量就有一個(gè)上限,再多了無法處理。Lighthouse基站本身不處理任何信息,所有數(shù)據(jù)由跟蹤傳感器本地報(bào)告,這是一個(gè)天然的分布式系統(tǒng)。這套系統(tǒng)可以很方便地支持多人:兩個(gè)玩家可以很輕松的在一個(gè)場地里同時(shí)體驗(yàn)。

所以Lighthouse造就了目前最好的VR體驗(yàn)。Vive的頭動(dòng)跟蹤和手柄跟蹤都非常精確,延遲極低,用戶甚至可以做出將手柄拋來拋去的動(dòng)作。就個(gè)人體驗(yàn)而言,Vive的頭動(dòng)和手柄跟蹤的精確程度已經(jīng)讓人真的產(chǎn)生了“這就是現(xiàn)實(shí)”的錯(cuò)覺——你會(huì)不自覺的對你在整個(gè)環(huán)境中所能做到的事情產(chǎn)生更高的期望,比如大動(dòng)態(tài)的動(dòng)作,試著去伸手夠到遠(yuǎn)方的物體,等等。
當(dāng)然Lighthouse系統(tǒng)并不是完美無缺。它的主要問題是兩個(gè):
從理論來講,Lighthouse的精度依賴于系統(tǒng)的時(shí)間分辨率。
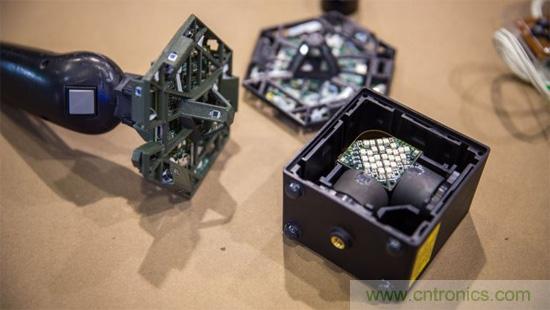
傳感器點(diǎn)亮的時(shí)候需要精確的知道激光當(dāng)時(shí)的角度,那么就需要很精確的測量激光到達(dá)的時(shí)間。光敏傳感器本身也有一定寬度,如果傳感器“擠”在一起,間距達(dá)到了傳感器本身的寬度量級,那么測角本身就會(huì)出現(xiàn)誤差了。所以光敏傳感器的分布之間需要一定的距離,設(shè)備不能制造的太小。Valve表示要保持對一個(gè)剛體的跟蹤,需要至少5個(gè)傳感器形成一個(gè)陣列。所以,Vive的手柄前方的傳感器陣列部分體積龐大,是有原因的。
要滿足跟蹤穩(wěn)定性和傳感器分布的尺寸要求,Vive手柄前端才被設(shè)計(jì)成一個(gè)甜甜圈形狀。如果想要將設(shè)備的尺寸縮小,那么就得將光敏傳感器本身的尺寸縮小,同時(shí)降低傳感器之間的距離,這個(gè)時(shí)候就需要更高的測角精度,系統(tǒng)的時(shí)間分辨率要求就提升了。

另一個(gè)問題是Lighthouse系統(tǒng)的可擴(kuò)展性。
如果在一個(gè)空間里L(fēng)ighthouse有許多基站的話,很有可能出現(xiàn)的情況是光敏傳感器同一時(shí)間內(nèi)被多道激光掃過,就很難分清楚激光是來自哪個(gè)基站,位置計(jì)算能力就會(huì)變差了。目前的Lighthouse是使用時(shí)分復(fù)用:任意時(shí)刻只有一個(gè)基站發(fā)光。在未來最徹底的解決方案應(yīng)該是頻分復(fù)用——光敏傳感器接受的每一道激光都帶有信息報(bào)告自己的基站的id,但是這樣整個(gè)系統(tǒng)的設(shè)計(jì)會(huì)變得比現(xiàn)在復(fù)雜得多,在那么短的一道激光中做到這一點(diǎn),也可能需要更昂貴的設(shè)備。Valve表示這套系統(tǒng)是理論上可擴(kuò)展到無限容量的,但是他們并沒有披露具體是用怎樣的方法做到這一點(diǎn)。
Lighthouse可以說是Valve帶給VR的一個(gè)重要貢獻(xiàn):它是目前所有的低成本室內(nèi)定位系統(tǒng)中性能最好的。
在公布的當(dāng)初Valve表示將會(huì)開放這套系統(tǒng),各種需要室內(nèi)定位的科技產(chǎn)品都可以應(yīng)用Lighthouse——如果這件事情成真,毫無疑問對國產(chǎn)VR頭顯廠商是一個(gè)非常大的利好消息。不過到目前這件事情還沒有動(dòng)靜。但是Lighthouse技術(shù)原理并不復(fù)雜,國內(nèi)已經(jīng)有公司在試著自己開發(fā)類似的技術(shù)。具體效果如何,讓我們拭目以待。
