
【導(dǎo)讀】在這里,作者將嘗試找出關(guān)于極點(diǎn)和零點(diǎn)的物理感覺,使用運(yùn)算放大器來控制它們?cè)趶?fù)平面中的位置,并利用電路的自然響應(yīng)來說明極點(diǎn)/零點(diǎn)位置的影響。
單端口電路的自然響應(yīng)
我們來看圖1中的無源線性單端口電路,它包括電阻、電容和電感。
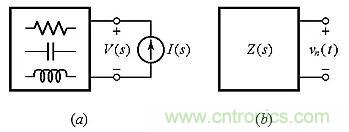
圖1:(a)無源單端口電路 (b)自然(或無源)開路響應(yīng)vn(t)。
如果我們施加一個(gè)測(cè)試電流I(s),單端口電路將產(chǎn)生電壓V(s),使得V(s)=Z(s)/(s),其中I(s)和V(s)是所施加電流和所產(chǎn)生電壓的拉普拉斯變換,s是以sec-1為單位的復(fù)數(shù)頻率。阻抗Z(s)是s的有理函數(shù)形式,即分子多項(xiàng)式N(s)與分母多項(xiàng)式D(s)的比值:
公式N(s)=0的根被稱為Z(s)的零點(diǎn),表示為z1,z2,……;而公式D(s)=0的根被稱為Z(s)的極點(diǎn),表示為p1、p2、……。極點(diǎn)和零點(diǎn)統(tǒng)稱為根,也稱為臨界頻率。例如,阻抗:
當(dāng)s=0時(shí),其值為零;當(dāng)s=-3±j4時(shí),它具有復(fù)共軛極點(diǎn)對(duì)??梢杂酶鶃肀磉_(dá)它,即:
如果我們繪制|Z(s)|相對(duì)于s的幅度曲線,則可以直觀理解零點(diǎn)和極點(diǎn)的含義。所得到的曲線就好像在s平面上豎起的帳篷,在零點(diǎn)處接觸s平面,而在極點(diǎn)處其高度變?yōu)闊o限。
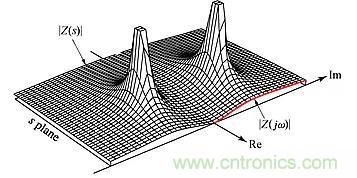
圖2:Z(s)=(10Ω)s/(s2+6s+25)的幅度圖。(通過在虛軸上計(jì)算|Z|獲得的分布曲線圖顯示出單端口電路的交流響應(yīng)。)
為了找到極點(diǎn)的物理感覺,我們?cè)趕接近極點(diǎn)pk時(shí)施加電流I(s),就可以用相當(dāng)小的I(s)獲得給定的電壓V(s)。s越接近極點(diǎn)pk,獲得給定電壓V(s)所需的電流I(s)越小。在s→pk的極限狀態(tài)下,即使電流為零,即開路,單端口電路也會(huì)獲得一個(gè)非零的供電電壓(見圖1b)!這個(gè)電壓稱為自然響應(yīng)或無源響應(yīng),因?yàn)閱味丝陔娐房衫脙?chǔ)存在其電容和電感內(nèi)部的能量來產(chǎn)生電壓。這些能量在電阻中消耗盡了,在無源單端口的情況下,它們將隨時(shí)間呈指數(shù)級(jí)衰減。實(shí)際上,系統(tǒng)理論預(yù)測(cè)到自然響應(yīng)符合以下表達(dá)式:
其中a1,a2,......,是取決于存儲(chǔ)能量的合適系數(shù)(以V為單位),Z(s)的極點(diǎn)是指數(shù)中時(shí)間常數(shù)的倒數(shù)。
那么Z(s)的零點(diǎn)呢?我們來看圖3,它表示圖1的兩種情況?,F(xiàn)在施加的信號(hào)是電壓V(s),而響應(yīng)是電流I(s)=[1/Z(s)]V(s),這表明Z(s)的零點(diǎn)現(xiàn)在成為1/Z(s)的極點(diǎn)。通過雙重推理,在s→zk的極限狀態(tài)下,即使施加零電壓(短路),單端口電路也將提供非零電流(參見圖3b)!該電流稱為自然響應(yīng)或無源響應(yīng),因?yàn)閱味丝陔娐防脙?chǔ)存在其電容和電感內(nèi)部的能量來產(chǎn)生電流。系統(tǒng)理論預(yù)測(cè)自然短路電流響應(yīng)符合以下表達(dá)式:
其中b1,b2,......,是取決于存儲(chǔ)能量的合適系數(shù)(以安培為單位),Z(s)的零點(diǎn)是指數(shù)中時(shí)間常數(shù)的倒數(shù)。
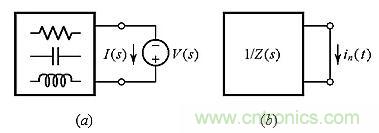
圖3:(a)無源單端口電路(b)自然(或無源)短路響應(yīng)in(t)。
總而言之,單端口電路的自然響應(yīng)由其阻抗Z(s)的根控制:極點(diǎn)控制開路電壓響應(yīng)vn(t),而零點(diǎn)控制短路電流響應(yīng)in(t)。在某種程度上,根就像是單端口電路的DNA。例如,我們來看圖4的單端口電路。在t=0時(shí),電容兩端的電壓為9V,頂部為正,t>0時(shí)它的自然響應(yīng)是什么?可以看出單端口電路呈現(xiàn)的阻抗是:
顯然,z1=–1/(R1C)=-1/(10ms),p1=-1/[(R1+R2)C]=-1/(30ms)。此外,a1=[20/(10+20)]9=6V且b1=9/10=0.9mA。所以:
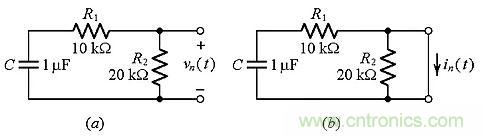
圖4:找出(a)開路和(b)短路的自然響應(yīng)。
單極點(diǎn)控制
在圖5a的電路中,由vn表示的節(jié)點(diǎn)和地之間的阻抗為Z(s)=R||(1/sC)=R/(1+sRC),因此在s=-1/(RC)=-1/(1ms)時(shí)電路具有一個(gè)極點(diǎn)。假設(shè)vn(0)=1V,我們可以得到:
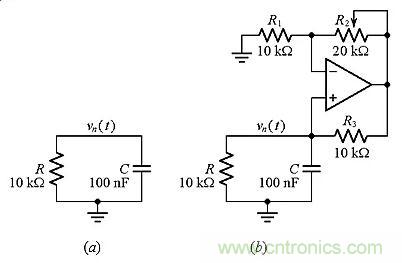
圖5:(a)基本電路(b)相同的電路,但可以控制極點(diǎn)。
無論怎樣選擇R和C的值,該電路的極點(diǎn)將始終為負(fù)。我們希望找到控制它的方法,以便將其驅(qū)動(dòng)為零甚至使其成為正的。圖5b示出的電路可以完成這項(xiàng)工作。非反相放大器檢測(cè)vn并輸出電壓:
(1 + R2/R1)vn = (1 + k)vn
k = R2/R1
其中R2代表電位器在其左端和游標(biāo)之間的部分。對(duì)于給定的元件值,從左端到右端改變游標(biāo)將使k在0<k<2的范圍內(nèi)變化?,F(xiàn)在,R3上的電壓為(1+k)vn–vn,即kvn,在右邊是正的,表明R3將為C提供電流kvn/R3。鑒于R從C中汲取電流vn/R,因此從C流出的凈電流為iC=vn[1/R+1/(-R3/k)],表明C視R與一個(gè)負(fù)電阻–R3/k并聯(lián),凈等效電阻Req=R||(–R3/k)]。擴(kuò)展后可以得到:

對(duì)于給定的元件值,我們有Req=(10kΩ)/(1–k),因此極點(diǎn)位置現(xiàn)在為s=-1/(ReqC)=-(1–k)/(1ms),公式(4)變?yōu)椋?/div>
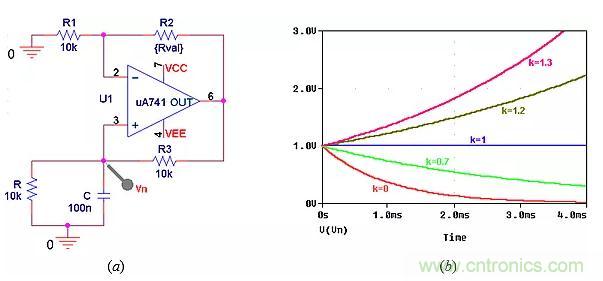








我們討論一下電路作為游標(biāo)設(shè)置函數(shù)的工作原理,使用圖6中的PSpice電路來顯示隨后的自然響應(yīng)類型。
當(dāng)游標(biāo)一直向左(k=0)時(shí),R3上的電壓降為零,因此R3帶有零電流,C通過R放電,時(shí)間常數(shù)為1ms,如公式(4)所示;
將游標(biāo)向右移動(dòng)時(shí),R3將電流提供給C,只要該電流小于R汲取的電流,C仍然會(huì)呈指數(shù)放電,但速度比k=0時(shí)要慢;
當(dāng)游標(biāo)處于中間(k=1)時(shí),R3輸出的電流等于R汲取的電流,電容的凈電流為零,因此電容電壓保持恒定;
將游標(biāo)進(jìn)一步向右移動(dòng)(k>1),使得源電流大于汲取電流,因此C呈指數(shù)充電,從而產(chǎn)生不同的響應(yīng),直到運(yùn)放飽和。
圖6:PSpice電路顯示不同k值的自然響應(yīng),假設(shè)電容最初充電電壓為1V。
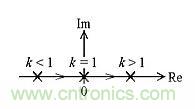
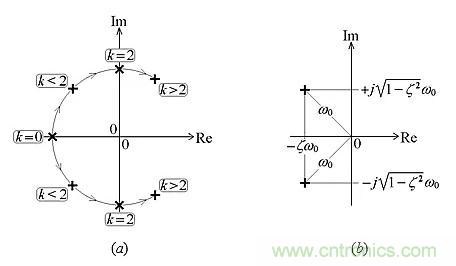
圖7描繪了隨k變化的極點(diǎn)位置。
圖7:極點(diǎn)軌跡是k的函數(shù)。
極點(diǎn)對(duì)控制
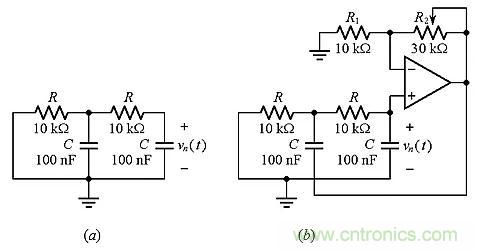
在圖8a的電路中,干擾產(chǎn)生自然響應(yīng)vn(t)的阻抗是:
D(s)的階數(shù)表明我們現(xiàn)在有一個(gè)二階系統(tǒng)。對(duì)于這樣的系統(tǒng),D(s)通常以更方便的形式表達(dá):
其中ζ稱為阻尼比,ω0稱為無阻尼固有頻率。設(shè)D(s)=0,可以得到極點(diǎn)對(duì):
比較公式(8)和(9),我們發(fā)現(xiàn)圖8a的電路具有:ζ=1.5和ω0=1/(RC)=1/(1ms)。代入公式(10)得到極點(diǎn)對(duì)p1=-1/(0.3818ms),p2=-1/(2.618ms),表示vn(t)由一對(duì)指數(shù)衰減組成,因?yàn)殡娮柘牧舜鎯?chǔ)在電容中的電能。
為簡(jiǎn)單起見,假設(shè)圖8a的RC對(duì)完全相同??梢钥闯?,無論我們?cè)鯓舆x擇元件值,該電路的極點(diǎn)將始終為負(fù)實(shí)數(shù)。
圖8:(a)基本電路(b)相同的電路,但可以控制極點(diǎn)。
我們希望可以找到方法來控制它們?cè)趶?fù)平面上的位置,以便將它們放置在虛軸上,甚至使它們溢出到復(fù)平面的右半部分。圖8b示出了可完成這項(xiàng)工作的電路。其中最左邊的電容被提升離地,由一個(gè)非反相放大器驅(qū)動(dòng),該放大器檢測(cè)到vn并輸出電壓(1+R2/R1)vn=(1+k)vn,k如公式(5)所示。對(duì)于給定的元件值,從左端到右端改變游標(biāo)將使k在0<k<3的范圍內(nèi)變化。這樣做的目的是想通過改變k值,使運(yùn)算放大器通過最左邊電容注入的能量改變甚至超過電阻消耗的電能。
使用熟悉的電路分析技巧,我們發(fā)現(xiàn)干擾產(chǎn)生自然響應(yīng)vn(t)的阻抗為:
表明2-k=2ζ,或:
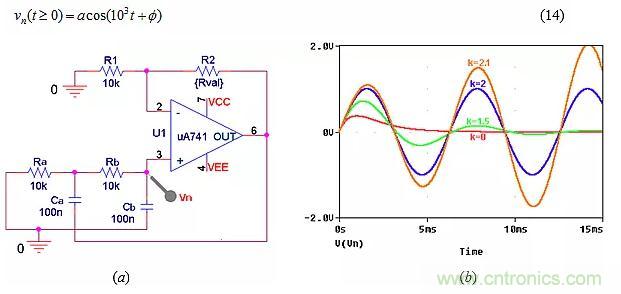
ω0=1/(RC)=1/(1ms)。我們來討論電路隨游標(biāo)設(shè)置變化的工作原理,同樣,使用圖9a的PSpice電路來顯示隨后的自然響應(yīng)類型,如圖9b所示。
隨著游標(biāo)一直向左滑動(dòng)(k=0),可以得到ζ=1。公式(10)得到重合的極點(diǎn)對(duì)p1=p2=-1/(1ms)。在這種情況下,系統(tǒng)理論預(yù)測(cè)該類型的自然響應(yīng)為:
其中a和b是適合的系數(shù),取決于t=0時(shí)存儲(chǔ)在電容中的能量。如圖9b所示,在初始浪涌之后,自然響應(yīng)呈指數(shù)衰減至趨于零。
設(shè)k=2,得到ζ=0,所以公式(10)預(yù)測(cè)純虛極點(diǎn)對(duì)p1,2=±j103,其中j是虛數(shù)單位(j2=-1)。使用歐拉公式exp(jα)+exp(–jα)=2cosα,可以看出自然響應(yīng)現(xiàn)在采用這種形式:
圖9:PSpice電路顯示對(duì)應(yīng)于不同k值的自然響應(yīng),假設(shè)在t=0時(shí),Ca充電到1V,Cb放電。
其中a和φ是適合的系數(shù),取決于t=0時(shí)存儲(chǔ)在電容中的能量。其結(jié)果是持續(xù)振蕩,也稱為無阻尼振蕩(因此稱為ω0)。物理上,運(yùn)算放大器注入單端口電路的能量等于端口電阻消耗的能量,這讓電容以某種乒乓方式交換能量。
● 對(duì)于0<k<2,有1>ζ>0,所以現(xiàn)在公式(10)可以預(yù)測(cè)一對(duì)復(fù)共軛極點(diǎn)。例如,當(dāng)k=1.5時(shí),由公式(12)得到ζ=0.25,因此由公式(10)得到:
代入公式(2),合并,并再次使用歐拉公式,將得到自然響應(yīng)公式:
其中a和φ是適合的系數(shù),取決于t=0時(shí)存儲(chǔ)在電容中的能量。
如圖9b所示,對(duì)于k=1.5,電容仍然以乒乓方式開始交換能量,但是該能量逐漸被電阻消耗,從而產(chǎn)生阻尼振蕩。
● 將k提高到2以上,使運(yùn)算放大器注入的能量超過端口電阻可以消耗的能量,引起發(fā)散振蕩,如圖9b中k=2.1所示。振蕩將持續(xù)增長到運(yùn)算放大器飽和為止。
圖10示出了隨k變化的根軌跡??偠灾?,無源電路的極點(diǎn)位于復(fù)平面的左半部分。為了使它們溢出到右半平面,我們需要一個(gè)有源元件,例如示例中的運(yùn)算放大器,從自己的電源端獲取能量并將其注入單端口電路。右半平面的極點(diǎn)導(dǎo)致發(fā)散的響應(yīng),最終使放大器飽和。
圖10:(a)作為k的函數(shù)的根軌跡(b)在阻尼響應(yīng)狀態(tài)下的極點(diǎn)對(duì)。
一個(gè)流行應(yīng)用
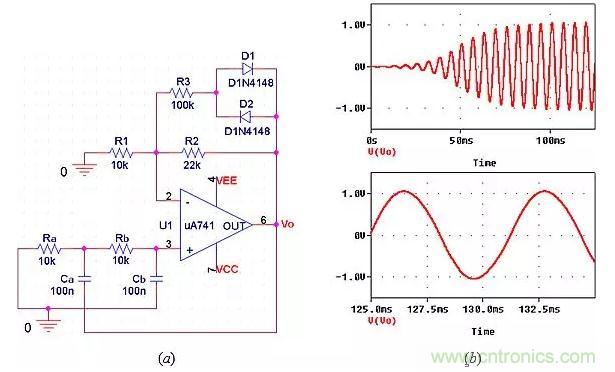
我們的電路控制極點(diǎn)對(duì)位置的能力可用于產(chǎn)生持續(xù)的正弦波。為此,它需要滿足兩個(gè)條件。
● 為了可以自己?jiǎn)?dòng),電路的初始配置必須使其極點(diǎn)對(duì)位于復(fù)平面的右半部分(k>2.0)。
圖11:在虛軸上放置并保持一對(duì)極點(diǎn),以產(chǎn)生正弦波。
即使兩個(gè)電容最初都放電,運(yùn)算放大器的一點(diǎn)噪聲輸入就足以觸發(fā)不斷增長的振蕩。
● 一旦振蕩達(dá)到所需幅度,就必須采取一些機(jī)制進(jìn)行干預(yù),以防止其進(jìn)一步增長,并將其保持在該幅度。這需要將極點(diǎn)對(duì)放置在虛軸(k=2.0)上,并自動(dòng)保持極點(diǎn)在其上,不管元件老化和漂移,或者任何其它干擾。
在圖11a中,電源接通時(shí),兩個(gè)二極管仍然關(guān)閉,因此k=R2/R1=22/10=2.2,表明振蕩增加。隨著振蕩的增加,二極管在交替的半周期內(nèi)逐漸導(dǎo)通,所以k=[R2||(R3+rd)]/R1,其中rd是動(dòng)態(tài)二極管電阻(rd隨二極管電流而減?。T趓d<<R3的極限情況下,我們將得到k=(22||100)/10=1.8,表示電路可在1.8<k<2.2的范圍內(nèi)調(diào)整k的值,這包括k=2.0時(shí)持續(xù)振蕩達(dá)到所需幅度的情況。
假如由于某種原因?qū)嶋H幅度超過期望值,rd將減小并導(dǎo)致k降至2.0以下,從而抵消幅度上升。相反,如果幅度降至所需值以下,rd將增加并使k上升到2.0以上,從而抵消幅度下降??傊挥衚=2.0時(shí)電路才能找到它的“和平”狀態(tài)。“啊,這就是負(fù)反饋的魔力!”作者的一名學(xué)生這樣感慨,他畢業(yè)后去了盧卡斯電影公司工作。

