
【導(dǎo)讀】工業(yè)現(xiàn)場存在著大量的電感性負(fù)載,如電動機(jī)、變壓器、繼電器、接觸器和電磁鐵等。由于這些設(shè)備和器件具有較大的電感和一定量值的分布電容,故當(dāng)對其進(jìn)行切投操作時,會產(chǎn)生幅值高達(dá)數(shù)百伏甚至數(shù)千伏的高頻干擾,成為在附近工作的計(jì)算機(jī)的主要干擾源。電感性負(fù)載切投時所產(chǎn)生的干擾是計(jì)算機(jī)控制系統(tǒng)最常見最嚴(yán)重最難克服的干擾之一。本文借助等效電路,對感性負(fù)載切投時產(chǎn)生干擾過程作了分析研究,并提出了抑制干擾的措施。
1 序言
工業(yè)現(xiàn)場存在著大量的電感性負(fù)載,如電動機(jī)、變壓器、繼電器、接觸器和電磁鐵等。由于這些設(shè)備和器件具有較大的電感和一定量值的分布電容,故當(dāng)對其進(jìn)行切投操作時,會產(chǎn)生幅值高達(dá)數(shù)百伏甚至數(shù)千伏的高頻干擾,成為在附近工作的計(jì)算機(jī)的主要干擾源。
2 感性負(fù)載切投時的等效電路
若開關(guān)時理想開關(guān),即假定開或閉的過程是一次性的,且該過程的持續(xù)時間為零,那么開關(guān)閉合而接通感性負(fù)載時,會對電網(wǎng)造成某種程度的沖擊。當(dāng)開關(guān)斷開并切斷感性負(fù)載時,負(fù)載上會產(chǎn)生極高的反電勢,但由于假定開關(guān)是理想的,其觸點(diǎn)間隙將把負(fù)載與電網(wǎng)隔離起來,使其不能通過傳導(dǎo)作用而施于電網(wǎng)側(cè)的計(jì)算機(jī),而只能以耦合和輻射的方式對計(jì)算機(jī)發(fā)生作用。因此,在理想情況下,開關(guān)的開與閉所產(chǎn)生的干擾都不算嚴(yán)重。但是,實(shí)際的開關(guān)操作不可避免地伴有間隙的電弧擊穿和觸點(diǎn)的抖動,加之觸點(diǎn)之間往往存有雜質(zhì),因此其開關(guān)過程不可能是理想性的一次斷開或閉合的過程,而是一個開閉不斷重復(fù)的開閉串過程,正是由于開關(guān)操作的這一特有運(yùn)動屬性,決定了電感性負(fù)載切投時所產(chǎn)生干擾的一些主要特點(diǎn)。在考慮了開關(guān)操作的開閉串效應(yīng)后,可借助一線性集總參數(shù)等效電路來研究電感性負(fù)載切投時產(chǎn)生干擾的過程,其等效電路如圖1所示。
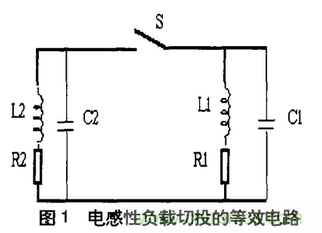
圖中L1、C1、R1分別為負(fù)載一側(cè)的等效電感、電容和電阻。L2為電源一側(cè)的等效電感,它主要由電源線電感構(gòu)成,一般情況下其量值在幾十 以下,且
以下,且 。C2為電源側(cè)的分布電容,其量值約為幾十pF,R2為電源側(cè)的電阻,主要指電源線的電阻,也為一很小值,絕大多數(shù)情況下
。C2為電源側(cè)的分布電容,其量值約為幾十pF,R2為電源側(cè)的電阻,主要指電源線的電阻,也為一很小值,絕大多數(shù)情況下 數(shù)量級上下。
數(shù)量級上下。
3 開關(guān)斷開而無擊穿時的干擾分析
因?yàn)殚_關(guān)斷開或接通時,都不可避免地會產(chǎn)生開閉串效應(yīng),引起觸點(diǎn)的重復(fù)開閉,故此兩種情況下產(chǎn)生的過程大體一致?,F(xiàn)僅以開關(guān)斷開時的情況為例分析干擾產(chǎn)生的機(jī)理。
當(dāng)開關(guān)斷開時,由于L1的儲能作用,其中的電流不會突然降至為零,因而 中的電流將流向
中的電流將流向 并對其充電,若忽略上的能量損耗及電容的初始儲能,可求的開關(guān)斷開后
并對其充電,若忽略上的能量損耗及電容的初始儲能,可求的開關(guān)斷開后 上的所能達(dá)到的最大值
上的所能達(dá)到的最大值
同理可得 上的最大電壓值
上的最大電壓值
式中I為開關(guān)斷開瞬間流經(jīng)電源導(dǎo)線,即電感性負(fù)載中的電流值。當(dāng)電流越大,其兩側(cè)的電壓越高。由于 知,
知, 。當(dāng)開關(guān)斷開,而未發(fā)生擊穿時,僅有
。當(dāng)開關(guān)斷開,而未發(fā)生擊穿時,僅有 通過供電線路與計(jì)算機(jī)相連,因其量值較小,不會對計(jì)算機(jī)構(gòu)成嚴(yán)重干擾。
通過供電線路與計(jì)算機(jī)相連,因其量值較小,不會對計(jì)算機(jī)構(gòu)成嚴(yán)重干擾。
開關(guān)斷開后,其兩側(cè)將形成一個回路,故開關(guān)兩側(cè)的電壓將按照二階網(wǎng)絡(luò)的運(yùn)動規(guī)律變化。其以電壓 為變量負(fù)載側(cè)的微分方程為
為變量負(fù)載側(cè)的微分方程為
當(dāng)開關(guān)斷開瞬時,若 恰為電源峰值電壓時,則因滯后其90度,故
恰為電源峰值電壓時,則因滯后其90度,故 為最小值零,因而,
為最小值零,因而, 回路將以
回路將以 為初始震蕩幅值作衰減震蕩,對于20V交流電源系統(tǒng)來說,此起始震蕩電壓幅值為311V,并不會形成嚴(yán)重干擾。
為初始震蕩幅值作衰減震蕩,對于20V交流電源系統(tǒng)來說,此起始震蕩電壓幅值為311V,并不會形成嚴(yán)重干擾。
當(dāng)開關(guān)斷開瞬時,若 為零,則
為零,則 將達(dá)到最大值
將達(dá)到最大值 ,即電感中儲能最大,此時,負(fù)載側(cè)電壓最高,往往達(dá)數(shù)千伏,故干擾最為嚴(yán)重。以此為初始條件可求得負(fù)載側(cè)電壓
,即電感中儲能最大,此時,負(fù)載側(cè)電壓最高,往往達(dá)數(shù)千伏,故干擾最為嚴(yán)重。以此為初始條件可求得負(fù)載側(cè)電壓

同理可求得電源側(cè)的電壓

有上述可知:
(1)當(dāng)開關(guān)斷開后,在開關(guān)兩側(cè)形成一個回路,每一回路均出現(xiàn)一衰減震蕩過程,它們的振幅幅值由開關(guān)斷開時的初始狀態(tài)決定。電感儲能最大時的震蕩情況可由式(1)和式(2)描述。
(2)負(fù)載側(cè)與電源側(cè)的衰減震蕩頻率分別為:
(3)負(fù)載側(cè)與電源側(cè)的震蕩均隨時間作指數(shù)衰減,衰減速率取決于電路參數(shù)R和L。由于 與
與 的量值極為懸殊,故有:
的量值極為懸殊,故有: ,即電源側(cè)的震蕩衰減要快得多。
,即電源側(cè)的震蕩衰減要快得多。
因此在開關(guān)斷開時未發(fā)生擊穿的情況下,電源側(cè)與負(fù)載側(cè)將分別產(chǎn)生震蕩,這兩個震蕩無論在幅值頻率和衰減率上都有極大的區(qū)別:電源側(cè)的震蕩頻率高,幅值小,衰減快,且可直接作用到計(jì)算機(jī)系統(tǒng)上形成干擾,而負(fù)載側(cè)的震蕩頻率低幅值高,衰減慢,由于開關(guān)的隔離使它無法直接干擾計(jì)算機(jī)。
4 開關(guān)觸點(diǎn)間隙擊穿時的干擾分析
電感性負(fù)載被開關(guān)斷開后其上的最大電壓為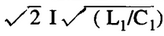 ,往往可達(dá)數(shù)千伏,而開關(guān)斷開的最初時刻,其觸點(diǎn)間隙卻很小,當(dāng)此高壓加于其上時,觸點(diǎn)間隙必然會被擊穿,將開關(guān)兩側(cè)電路重新連通,所以,負(fù)載側(cè)的干擾就不會再是單一的角頻率為
,往往可達(dá)數(shù)千伏,而開關(guān)斷開的最初時刻,其觸點(diǎn)間隙卻很小,當(dāng)此高壓加于其上時,觸點(diǎn)間隙必然會被擊穿,將開關(guān)兩側(cè)電路重新連通,所以,負(fù)載側(cè)的干擾就不會再是單一的角頻率為 的低幅值干擾了,而要嚴(yán)重和復(fù)雜得多。
的低幅值干擾了,而要嚴(yán)重和復(fù)雜得多。
一般認(rèn)為開關(guān)觸點(diǎn)間隙的最小擊穿電壓 約為320V。在開關(guān)斷開過程中隨著其觸點(diǎn)間隙的增大,擊穿電壓也相應(yīng)升高,觸點(diǎn)間可能達(dá)到的最大擊穿電壓主要由負(fù)載側(cè)的最大震蕩電壓幅值
約為320V。在開關(guān)斷開過程中隨著其觸點(diǎn)間隙的增大,擊穿電壓也相應(yīng)升高,觸點(diǎn)間可能達(dá)到的最大擊穿電壓主要由負(fù)載側(cè)的最大震蕩電壓幅值 決定,即
決定,即
在開關(guān)斷開的最初瞬間,負(fù)載側(cè)的電壓絕對值 將以震蕩形式升高,該電壓將與電源側(cè)的震蕩電壓串聯(lián)而施加于開關(guān)的觸點(diǎn)上,當(dāng)
將以震蕩形式升高,該電壓將與電源側(cè)的震蕩電壓串聯(lián)而施加于開關(guān)的觸點(diǎn)上,當(dāng) 大于觸點(diǎn)擊穿電壓
大于觸點(diǎn)擊穿電壓 時,間隙被擊穿,產(chǎn)生飛弧,將開關(guān)S兩側(cè)的電路連通,若忽視較小的弧壓降,可得圖2所示的等效電路。
時,間隙被擊穿,產(chǎn)生飛弧,將開關(guān)S兩側(cè)的電路連通,若忽視較小的弧壓降,可得圖2所示的等效電路。
由于 ,因此圖2電路中起主要作用的電感支路是
,因此圖2電路中起主要作用的電感支路是 串聯(lián)支路,同樣由于
串聯(lián)支路,同樣由于
 ,可知兩并聯(lián)電容支路起主要作用的是
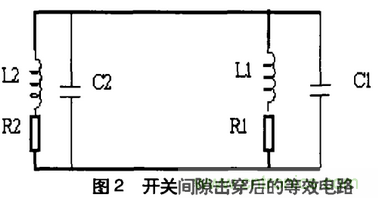
,可知兩并聯(lián)電容支路起主要作用的是 支路,所以可將圖2電路再進(jìn)行簡化為圖3所示的電路。圖中
支路,所以可將圖2電路再進(jìn)行簡化為圖3所示的電路。圖中 約等于
約等于 。
。
因?yàn)?img src="/editorfiles/20170410122102_7372.png" alt="微機(jī)控制系統(tǒng)感性負(fù)載切投時干擾產(chǎn)生的機(jī)理及抑制" width="80" height="18" />所構(gòu)成的震蕩回路具有頻率高,幅值小衰減快的特點(diǎn),在負(fù)載電流較小的情況下,可認(rèn)為當(dāng)擊穿發(fā)生時,該回路中的電流電壓均已衰減而接近于零。即初始條件為:

從而求得在觸點(diǎn)間隙擊穿后,電路中所產(chǎn)生的干擾電壓的較為簡潔的描述形式為

由此可知擊穿情況下所產(chǎn)生干擾的性質(zhì),其特點(diǎn)如下:
(1)電感性負(fù)載切投時,必然會出現(xiàn)開關(guān)間隙擊穿現(xiàn)象,形成開閉串過程,從而產(chǎn)生頻率很高幅值極大的干擾電壓。
(2)當(dāng)擊穿發(fā)生后,開關(guān)兩側(cè)共同構(gòu)成一新的震蕩電路,其震蕩電壓幅值和初相角均由擊穿時的初始條件確定。在負(fù)載電流較小的情況下,振蕩電壓幅值約為  ,因
,因 取值在320V與
取值在320V與
 之間,故幅值極高,震蕩的角頻率
之間,故幅值極高,震蕩的角頻率
 ,而擊穿前電路的另外的兩個震蕩角頻率分別為
,而擊穿前電路的另外的兩個震蕩角頻率分別為 ,比較三個頻率有
,比較三個頻率有 ,而
,而 與
與 較為接近。
較為接近。
觸點(diǎn)間隙擊穿后出現(xiàn)的震蕩電壓 兼有
兼有 幅值大和
幅值大和 頻率高的特點(diǎn),而又直接出現(xiàn)在電源系統(tǒng)上,因而成為對計(jì)算機(jī)最嚴(yán)重和最主要的干擾。由網(wǎng)絡(luò)理論知,該震蕩電壓達(dá)到峰值時,電路中的震蕩電流將降為零,此時觸點(diǎn)間的電弧熄滅,負(fù)載側(cè)和電源側(cè)又分別以角頻率和震蕩,其起始震蕩電壓值均為熄弧時的電壓。
頻率高的特點(diǎn),而又直接出現(xiàn)在電源系統(tǒng)上,因而成為對計(jì)算機(jī)最嚴(yán)重和最主要的干擾。由網(wǎng)絡(luò)理論知,該震蕩電壓達(dá)到峰值時,電路中的震蕩電流將降為零,此時觸點(diǎn)間的電弧熄滅,負(fù)載側(cè)和電源側(cè)又分別以角頻率和震蕩,其起始震蕩電壓值均為熄弧時的電壓。
由于 電源側(cè)震蕩電壓的極性反轉(zhuǎn)很快,在負(fù)載側(cè)電壓的任一半波時,都會多次出現(xiàn)與負(fù)載側(cè)電壓同極性串聯(lián)相加,故熄弧時,即使負(fù)載側(cè)電壓低于當(dāng)時的擊穿電壓
電源側(cè)震蕩電壓的極性反轉(zhuǎn)很快,在負(fù)載側(cè)電壓的任一半波時,都會多次出現(xiàn)與負(fù)載側(cè)電壓同極性串聯(lián)相加,故熄弧時,即使負(fù)載側(cè)電壓低于當(dāng)時的擊穿電壓 ,也可能導(dǎo)致間隙重新被擊穿,使角頻率為
,也可能導(dǎo)致間隙重新被擊穿,使角頻率為 的震蕩繼續(xù)下去,直到其電壓峰值低于
的震蕩繼續(xù)下去,直到其電壓峰值低于 時,觸點(diǎn)間電弧才完全熄滅。電弧熄滅后,負(fù)載側(cè)電壓將繼續(xù)按上述規(guī)律震蕩升高,當(dāng)其達(dá)到新的更高的一個擊穿電壓值時,間隙再次被擊穿,又重復(fù)上述的角頻率為
時,觸點(diǎn)間電弧才完全熄滅。電弧熄滅后,負(fù)載側(cè)電壓將繼續(xù)按上述規(guī)律震蕩升高,當(dāng)其達(dá)到新的更高的一個擊穿電壓值時,間隙再次被擊穿,又重復(fù)上述的角頻率為 的震蕩過程,形成所謂的開閉串。
的震蕩過程,形成所謂的開閉串。
