
【導(dǎo)讀】有源蜂鳴器在生活中被廣泛應(yīng)用,有源蜂鳴器控制簡(jiǎn)單但是成本較高,而且容易損壞,無(wú)源蜂鳴器的出現(xiàn)恰恰彌補(bǔ)了有源蜂鳴器的缺陷,但是無(wú)源蜂鳴器需要PWM驅(qū)動(dòng),但是PWM驅(qū)動(dòng)在軟件開發(fā)方面有難度。本文中專家給大家講述無(wú)需PWM驅(qū)動(dòng)無(wú)緣蜂鳴器的低成本電路。
無(wú)源蜂鳴器常規(guī)驅(qū)動(dòng)電路
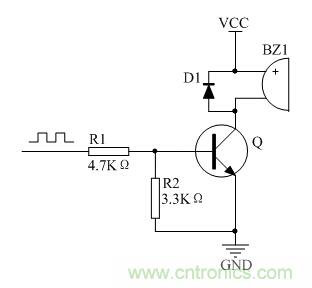
圖1:無(wú)源蜂鳴器常規(guī)驅(qū)動(dòng)電路
如圖1所示,此圖為無(wú)源蜂鳴器的常規(guī)驅(qū)動(dòng)電路。需要在輸入端輸入一定頻率PWM的信號(hào)才能使蜂鳴器發(fā)聲。為了解放PWM資源,實(shí)現(xiàn)簡(jiǎn)單控制,必須如有源蜂鳴器一樣提供一個(gè)振蕩電路。而有源蜂鳴器主要使用LC振蕩,如果要實(shí)際搭建此電路,電感參數(shù)比較難控制,而且成本高。此時(shí),自然會(huì)想到簡(jiǎn)易的RC振蕩,而由三極管構(gòu)成的RC多諧振蕩電路顯然是一個(gè)不錯(cuò)的選擇。
三極管多諧振蕩電路
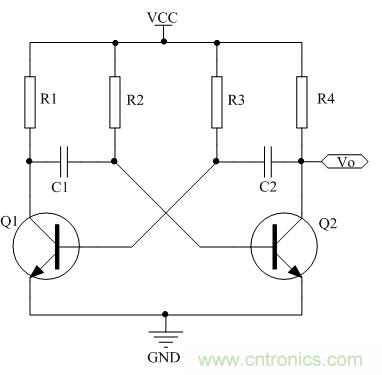
圖2:三極管多諧振蕩電路
三極管多諧振蕩的通用電路如圖2所示。這個(gè)電路起振的原理主要是通過(guò)電阻與電容的充放電使三極管交替導(dǎo)通。首先,在電路上電時(shí),分別通過(guò)R1與R4對(duì)電容C1與C2進(jìn)行充電。由于三極管元件的參數(shù)不可能完全一致,可以假設(shè)三極管Q1首先飽和導(dǎo)通,由于電容兩端的電壓不能突變,Q2的B極此時(shí)變成負(fù)壓,Q2截止,Vo端輸出高電平;C1通過(guò)R2進(jìn)行充電,當(dāng)C2的電位使BE極正向偏置時(shí),Q2導(dǎo)通,Vo端輸出低電平;同理C2電容兩端電壓不能突變,Q1的B極電壓變?yōu)樨?fù)壓,此時(shí)Q1截止。這樣循環(huán)往復(fù),使在Vo端輸,一定頻率的方波信號(hào)。如圖3所示,筆者使用示波器截取了Q1與Q2的B極和E極的波形,可以發(fā)現(xiàn)與上面的分析是吻合的。
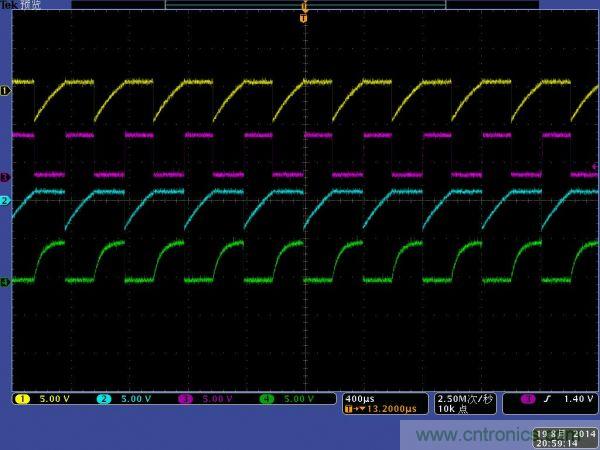
圖3:多諧振蕩電路充放電波形
從以上的分析可以看出,Vo的輸出信號(hào)頻率受到R2與C1,R3與C2充放電速度的控制。假設(shè),以Q2的C極作為信號(hào)的輸出,R2與C1的充電時(shí)間T1決定了輸出信號(hào)高電平時(shí)間,而R3與C2的充電時(shí)間T2決定了信號(hào)輸出低電平時(shí)間。而信號(hào)的頻率為:f=1/(T1+T2)。由此,可以推導(dǎo)出輸出信號(hào)的公式。由于RC充電時(shí)間公式:t=R*C*Ln[(E-V0)/(E-Vt)],在本電路中,E為VCC,V0為-(VCC-Vbe),Vt為Vbe,則,最終的公式為:t=R*C*Ln[(2*VCC-Vbe)/(VCC-Vbe)]。
接下來(lái),就可以進(jìn)行電路參數(shù)設(shè)計(jì)了。而筆者手中的蜂鳴器振蕩頻率全是2.4KHz的,所以此處只計(jì)算此頻率的參數(shù)。設(shè)電容C1=C2=0.1μF,VCC=5V,Vbe=0.63V則可以計(jì)算出電阻參數(shù):R=1/(2*10-7*2.4*103*Ln[(2*5-0.63)/(5-0.63)])=2.7KΩ。至于R1與R4的取值,只需要參數(shù)比R2與R3小一些即可,而信號(hào)輸出的邊沿的陡峭程度受這兩個(gè)電阻影響,電阻越小,邊沿越陡峭。按照此計(jì)算的參數(shù)搭建電路,測(cè)試頻率如圖4所示,實(shí)際頻率與理論值接近。
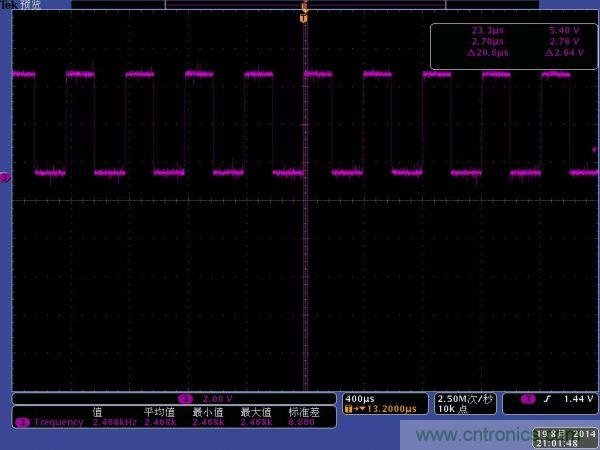
圖4:多諧振蕩Vo實(shí)際輸出信號(hào)
無(wú)源蜂鳴器驅(qū)動(dòng)電路改進(jìn)
上面的振蕩電路已經(jīng)有了,下面又該如何驅(qū)動(dòng)并且控制無(wú)源蜂鳴器呢?其實(shí),只需要將電路進(jìn)行簡(jiǎn)單修改即可實(shí)現(xiàn)目的。
第一,將原電路R4替換成為蜂鳴器,并在蜂鳴器兩端并聯(lián)二極管。細(xì)心的讀者如果看過(guò)《EasyARM-iMX283教你設(shè)計(jì)蜂鳴器電路》,會(huì)發(fā)現(xiàn)在無(wú)源蜂鳴器兩端沒(méi)有并聯(lián)電容。通過(guò)實(shí)際的電路測(cè)量,無(wú)源蜂鳴器并沒(méi)有產(chǎn)生尖峰脈沖,所以去掉此電容,如圖5所示。
蜂鳴器兩端的續(xù)流二極管的選擇十分的重要。如果二極管選擇不當(dāng),可能會(huì)引起蜂鳴器電路的不穩(wěn)定。通常使用的1N4148開關(guān)二極管,可能會(huì)使電路的充電回路不穩(wěn)定,使蜂鳴器的發(fā)聲比較嘶啞。在此電路中筆者建議二極管最好選擇肖特基類型的二極管。
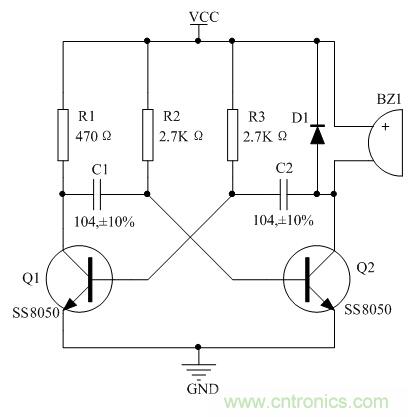
圖5:無(wú)源蜂鳴器驅(qū)動(dòng)電路
第二,為電路加入了一個(gè)控制端。在實(shí)際的電路中,不能讓蜂鳴器一直鳴叫,所以需要進(jìn)行控制??刂齐娐?,筆者想到了兩種,讀者也可以發(fā)揮自己的想象,改進(jìn)電路。
(1)在Q的B極通過(guò)一個(gè)小的電阻接到單片機(jī)的IO口,但此方法要求單片機(jī)IO處于開漏或弱上拉狀態(tài)。當(dāng)單片機(jī)輸出低電平時(shí),B極電壓非常低,不會(huì)飽和導(dǎo)通,振蕩也就停止了,蜂鳴器不叫;當(dāng)IO輸出高電平,由于處于弱上拉(內(nèi)部上拉電阻一般幾十K歐姆)或開漏狀態(tài),對(duì)電路的充放電電路幾乎沒(méi)有影響,電路開始振蕩,蜂鳴器鳴叫,電路如圖6的a圖所示。
(2)使用一個(gè)二極管對(duì)電路電路進(jìn)行隔離,如果單片機(jī)IO一不小心處于了推挽輸出狀態(tài),使用第一種方式電路的頻率就將被改變。如果使用二極管隔離,這樣不用擔(dān)心電路異常了,可以實(shí)現(xiàn)如(1)相同的簡(jiǎn)單控制。但要注意,此時(shí)二極管的導(dǎo)通壓降一定要比三極管的Vbe小,使三極管處于截止?fàn)顟B(tài),電路如圖6的b圖所示。
通過(guò)比較兩種方式可以發(fā)現(xiàn)加一個(gè)小電阻是一個(gè)即簡(jiǎn)單又廉價(jià)的控制方式,但如果想要“偷懶”,二極管的隔離是很好的選擇。

圖6:無(wú)源蜂鳴器控制電路
無(wú)源蜂鳴器電路兼容設(shè)計(jì)
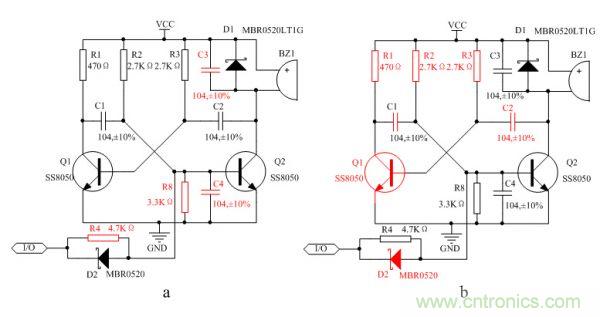
圖7:無(wú)源蜂鳴器兼容設(shè)計(jì)電路
為了電路的兼容性的設(shè)計(jì),即可驅(qū)動(dòng)無(wú)源蜂鳴器又能驅(qū)動(dòng)有源蜂鳴器,筆者設(shè)計(jì)如圖7所示的改進(jìn)電路。與圖6的b圖所示的電路比較,主要增加了兩個(gè)電阻和兩個(gè)電容。在實(shí)際的使用的過(guò)程中,可以根據(jù)實(shí)際的工程應(yīng)用,選擇合適的驅(qū)動(dòng)電路。
如果是驅(qū)動(dòng)無(wú)源蜂鳴器,如圖7的a圖所示,圖中標(biāo)為紅色的器件都不用焊接。而如果在設(shè)計(jì)過(guò)程中想讓電路使用有源蜂鳴器,可以修改為如圖7的b圖所示的電路,同樣圖中的紅色的器件不用焊接即可。
驅(qū)動(dòng)電路局限性分析
其實(shí),仔細(xì)的分析這個(gè)電路也存在一定的局限性。由于此三極管多諧振蕩電路的振蕩頻率主要是通過(guò)RC的沖放電時(shí)間來(lái)決定的。所以,電阻和電容的選擇尤其的重要。在大多數(shù)環(huán)境下,其實(shí)電阻的穩(wěn)定性是比較好的,電容最易受到溫度變化的影響。本次試驗(yàn)筆者使用了100nF電容,通過(guò)廠家提供的器件手冊(cè),在-55~+125度范圍內(nèi)誤差為±10%。也就是說(shuō),如果常溫(25度)頻率為2.4KHz,在惡劣的溫度環(huán)境下振蕩將在2.16KHz~2.64KHz范圍內(nèi),因此,在高低溫的環(huán)境下音調(diào)可能會(huì)發(fā)生一定的變化。
為了驗(yàn)證猜想,筆者也做了一個(gè)簡(jiǎn)單的試驗(yàn)作為驗(yàn)證。筆者將電路板的溫度控制到85度左右,然后使用示波器抓取此時(shí)三極管的輸出波形。通過(guò)示波器發(fā)現(xiàn),確實(shí)如所預(yù)料的一般,振蕩頻率發(fā)生了改變,變成了2.7KHz左右,與預(yù)估的頻率相近。然后,為了測(cè)試電路的低溫特性,又將電路板的溫度控制到-40度左右。此時(shí),測(cè)試蜂鳴器的輸出頻率為2.25KHz左右。這個(gè)數(shù)據(jù)也在初始的預(yù)計(jì)的范圍以內(nèi),有興趣的讀者也可以自己實(shí)踐試一試。
產(chǎn)品推薦
如圖8所示,此為廣州致遠(yuǎn)電子設(shè)計(jì)的M283工業(yè)級(jí)核心板。此產(chǎn)品是基于Freescale i.MX283 ARM9高性能處理器設(shè)計(jì),頻率高達(dá)454MHz,電源管理單元集成高效片上DC/DC,極低功耗,支持鋰離子電池供電。M283核心板適用于快速開發(fā)一系列最具創(chuàng)新性的應(yīng)用,如智能網(wǎng)關(guān)、手持機(jī)、掃描儀以及便攜式醫(yī)療設(shè)備等。

圖8:M283核心板
