
【導讀】如何使用集靈活性和高集成度于一身的全能ADC—— μModule數(shù)據(jù)采集系統(tǒng)ADAQ798x系列呢?ADI工程師為此撰寫了6篇博客,目的是幫助系統(tǒng)您充分利用ADAQ798x系列的靈活前端,并說明它可以如何配置以適應不同應用。
之前我們分享了該系列博客前兩篇,主要介紹了兩個問題
如何與小于ADC輸入范圍的單極性輸入源接口?
為何要配置ADC驅動器?
點擊可查看→ 全能ADC,你應該這樣用(連載 上)即可查看。
今天,我們來看看該系列博客的第三篇和第四篇——同相求和配置以及支持衰減的同相求和配置。
同相求和配置
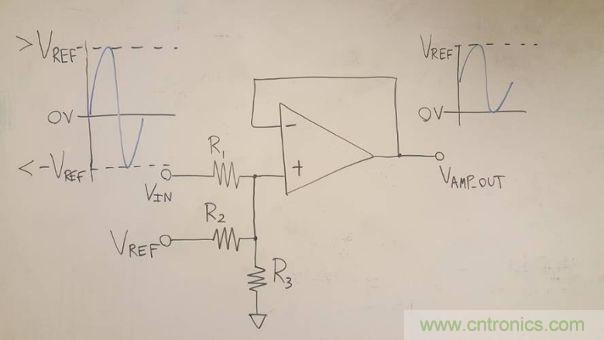
雙極性信號在低電壓(0 V)上下擺動。由于 ADAQ798x 集成 ADC 只能轉換0 V 到 VREF 的信號,所以針對該 ADC,需要將雙極性信號加以直流偏置和適當調整。為了完成這一任務,以下配置給標準同相配置增加了兩個電阻(R1和R2)。
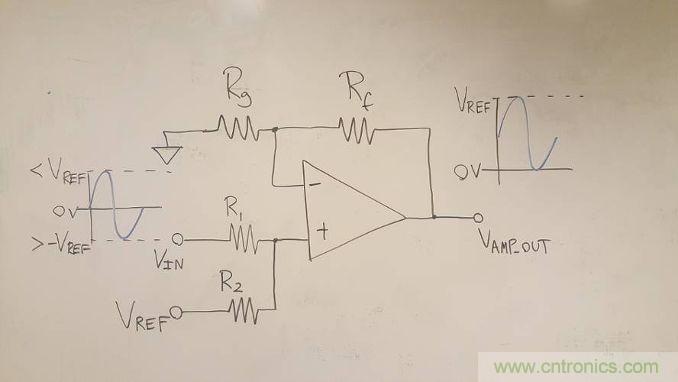
此配置將輸入信號與一個單獨的直流電壓求和,以將ADC驅動器輸出偏置到ADC中間電平輸入(VREF/2),從而實現(xiàn)雙極性到單極性的轉換。基準電壓(VREF)用作直流電壓常常是可行的,這樣就無需其他電路(反正ADAQ798x總是伴隨一個基準電壓源?。K€能防止VREF偏差給系統(tǒng)增加失調誤差,因為ADC驅動器的直流偏置總是VREF的一半。鑒于這些原因,我們將專門討論這種將VREF用作直流“變換”電壓的配置。
此配置的傳遞函數(shù)如下:

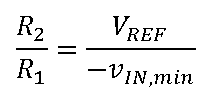
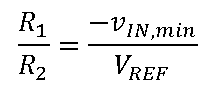
與普通同相配置類似,Rf和Rg之比決定從IN+到AMP_OUT的增益,但此比值現(xiàn)在也依賴于vIN的輸入幅度。注意vIN為雙極性,但同相節(jié)點上的電壓為單極性。這意味著,對應于vIN的最小值,IN+上的電壓必須為0 V:

由此關系可得出R1和R2之比:
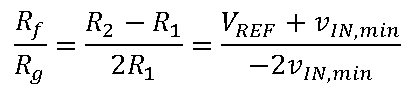
Rf和Rg可利用該配置的傳遞函數(shù)以及vIN為0 V時ADC驅動器輸出(vAMP_OUT)等于VREF/2的條件來確定。求解Rf和Rg的方程可得:
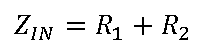
現(xiàn)在有了R1和R2之比及Rf和Rg之比,但我們還需要挑選特定的值。我們已在該系列博客《增加單極性輸入的增益》中討論了Rf和Rg值的選擇。R1和R2的選擇應基于應用的噪聲、精度和輸入阻抗要求確定。小電阻會改善噪聲,可降低其與ADC驅動器輸入偏置電流相互作用所引起的失調誤差,但若要提高輸入阻抗并降低基準源的輸出電流,則需要大電阻。此電路的輸入阻抗為:
注意,對于vIN幅度為±VREF的特殊情況,Rf和Rg之比為0。這種情況下,ADC驅動器增益為1,意味著省去Rg,Rf可以為0 Ω。
舉例說明
ADAQ7980需要對±1 V輸入信號執(zhí)行雙極性到單極性轉換,VREF= 5 V,使用Rf= 2 kΩ。利用上述公式,R2須為R1的5倍,Rf須為Rg的2倍。Rf為2 kΩ,所以Rg須為1 kΩ。R1和R2的具體值可根據(jù)應用要求選擇。對于本例,我們希望選擇R1和R2的組合來抵消輸入偏置電流對失調誤差的影響。技術文章《運算放大器輸入偏置電流》中已經闡明,為實現(xiàn)此目的,R1||R2應等于Rf||Rg,故R1= 800 Ω,R2= 4 kΩ。
我們再考慮一個例子:vIN = ±10 V,VREF = 5 V。這種情況下,我們會遇到Rf和Rg之比為負數(shù)的問題,所以利用這種配置實際上不能實現(xiàn)該輸入范圍。事實上,適合此配置的最大vIN為±VREF,此時ADC驅動器增益等于1。幸運的是,我們會在本系列接下來的文章中討論其他兩種允許我們超出此輸入范圍的配置。
若將R2接地而不是接VREF,則以上配置也可用于單極性信號。這一修改對需要衰減以用于ADC的單極性輸入信號(幅度大于VREF)有用。這種情況下,ADC驅動器極有可能是單位增益,故不需要Rf和Rg。
如上所述,如果應用要求高輸入阻抗,則R1和R2必須很大,這可能會提高系統(tǒng)的本底噪聲。我們可以通過增加分流電容和/或通過過采樣和抽取來補償噪聲增加。兩種方案均通過損失輸入信號帶寬來降低本底噪聲。但是,對于低帶寬或直流應用,輸入帶寬不那么重要。因此,這些配置更適合低帶寬、高輸入阻抗應用。我們將在下一篇文章中更詳細討論這個話題。
然而,有一個問題未涉及,那就是ADC驅動器流過電阻的輸入偏置電流所引起的失調誤差。電阻越大,引起的直流誤差越大。通過調整R1和R2之比以補償不需要的壓降,或通過選擇Rf和Rg的值來抵消R1和R2引起的失調,可以降低此誤差,不過輸入范圍會有損失。但應注意,Rf 必須足夠小以確保放大器穩(wěn)定,故第二種方案并不總是可行。
支持衰減的同相求和配置
針對大于±VREF的信號,可采用以下配置來執(zhí)行帶衰減的雙極性到單極性轉換。
此配置與上文的【同相求和配置】討論的配置相似,區(qū)別在于不再需要Rf和Rg,但增加了R3以提供額外的信號衰減。此配置的傳遞函數(shù)如下:

這次求得R1、R2和R3之比的數(shù)學計算較為復雜,但我們可以使用同之前配置相似的方法。求出電阻之比后,便可根據(jù)應用需求選擇具體的值。為了簡潔起見,這里不敘述推導的每一步,但我們會看到,對于vIN的最小值和最大值,傳遞函數(shù)的簡化使我們能得出電阻比。
R1和R2之比是利用該配置的傳遞函數(shù)并代入vIN最小值(使得vAMP_OUT等于0 V)而得出:

R3不出現(xiàn)在公式中,求解R1和R2得到:
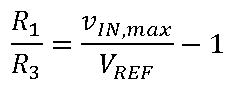
R1和R3之比是代入vIN最大值(使得vAMP_OUT等于VREF)而得出:

這一次,R2不出現(xiàn),求解R1和R3得到:
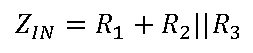
此時,我們可以選擇其中任一電阻的值(考慮VREF和vIN范圍),然后計算另兩個電阻的值。像以前一樣,主要權衡因素是輸入阻抗與系統(tǒng)噪聲和失調誤差。此電路的輸入阻抗(ZIN)為:
再次考慮該上文【同相求和配置】部分的例子,其中vIN = ±10 V,VREF = 5 V,用1 MΩ的輸入阻抗設計該配置。對于vIN和VREF的這種組合,R1須為R2的2倍,且等于R3。將R2和R3與R1的比值用于輸入阻抗公式,得到R1 = 750 kΩ。因此,R2和R3分別為375 kΩ和750 kΩ。
正如上文【同相求和配置】所述,需要權衡輸入阻抗與系統(tǒng)噪聲性能。實現(xiàn)高輸入阻抗需要大電阻,而后者會產生更多熱噪聲,并與ADC驅動器的輸入電流噪聲相互作用,產生更多輸入電壓噪聲。二者均會提高ADC輸入端的有效均方根電壓噪聲,導致性能大幅降低。在上例中,系統(tǒng)總噪聲約為334 μV rms(使用5 V基準源時,動態(tài)范圍降低整整15.5 dB,從92 dB降至74.5 dB)!
但還有希望!如果限制輸入帶寬,這種配置實際上可以實現(xiàn)接近最優(yōu)的性能。例如,若將上例中的輸入帶寬限制為20 kHz,則全系統(tǒng)噪聲幾乎降低10倍,達到48 μV rms(對于VREF = 5 V,動態(tài)范圍為91.4 dB)!我們可以通過增加分流電容CS來限制輸入帶寬(BWin),如下圖所示。注意,對于這些噪聲計算,我們可以將R1、R2和R3看作單個電阻RS,其中RS為R1、R2和R3的并聯(lián)組合。
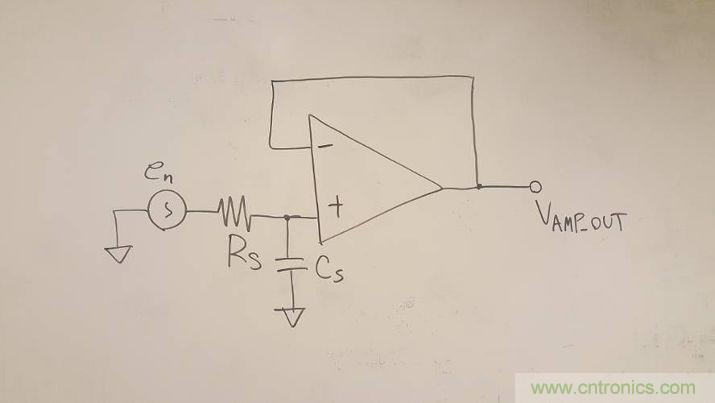
技術指南《單極點系統(tǒng)的運算放大器總輸出噪聲計算》說明了如何計算RS產生的噪聲(包括熱噪聲及其與ADC驅動器輸入電流的相互作用)。ADAQ798x 的主要區(qū)別在于噪聲帶寬是由集成RC濾波器設置,而不是指南中的放大器帶寬。RS給ADC輸入端增加的有效值噪聲為:
(en為RS的約翰遜噪聲,G為ADC驅動器增益。)
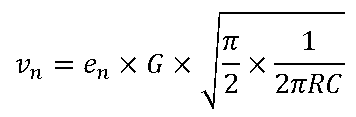
CS通過降低ADC驅動器的輸入帶寬來減小到達ADC的噪聲。如果RS和CS的截止頻率遠小于集成RC濾波器的截止頻率(4.42 MHz),則RS的噪聲貢獻可以利用RS和CS計算,代替上式中的R和C。
系統(tǒng)總噪聲為ADAQ798x中各噪聲源的和方根,包括RS的噪聲、ADC驅動器的輸入電壓噪聲和ADC的有效值噪聲。下圖顯示了多個RS值對應的系統(tǒng)噪聲與輸入帶寬的關系。
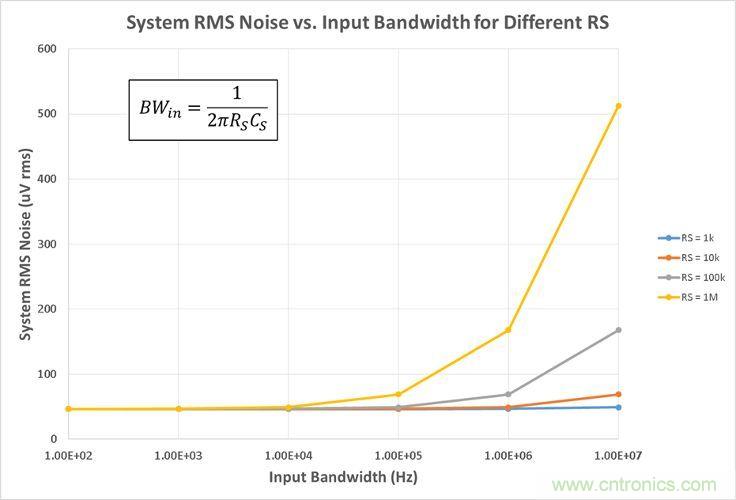
注意隨著輸入帶寬降低,全系統(tǒng)噪聲趨向于ADAQ798x的總有效值噪聲(44.4 μV rms)。這意味著降低帶寬所獲得的減噪收益會在某一頻率遞減,該頻率取決于RS有效值。
本部分討論了一種允許 ADAQ798x 接受大于±VREF的雙極性輸入的ADC驅動器配置,并說明了如何基于電阻值(以及可選的分流電容CS)計算輸入阻抗和系統(tǒng)噪聲。
雖然已證明增加CS可降低噪聲,但它也會限制可用輸入帶寬。因此,將此配置用于寬帶寬應用時,要實現(xiàn)高輸入阻抗常常是不切實際的。此配置僅推薦用于需要高輸入阻抗的低帶寬應用。
推薦閱讀:

