
【導(dǎo)讀】殘余相位噪聲測量法消除了外部噪聲源(例如電源或輸入時(shí)鐘)的影響,而絕對相位噪聲測量法包含了這些來源的噪聲。殘余相位噪聲裝置可以隔離并測量器件的相加相位噪聲。利用此信息,設(shè)計(jì)師可在信號鏈中選擇各個(gè)器件,以滿足整個(gè)系統(tǒng)的相位噪聲要求。本文包含了定時(shí)器件的相位噪聲圖,以突出殘余相位噪聲裝置的屬性。此外,它還說明了如何使用相加相位噪聲來識別信號鏈中的噪聲問題來源。
圖 1 顯示了用于測量待測器件 (DUT) 的相加相位噪聲的裝置。請注意,使用了兩個(gè) DUT;每個(gè) DUT 均連接到公用電源和輸入時(shí)鐘。這些公用噪聲源產(chǎn)生的相位噪聲在每個(gè) DUT 輸出處相關(guān)聯(lián)。通過簡單地將相位檢測器建模成為一個(gè)具有與增益 KPD 的模擬乘法器,可以得出輸出相位噪聲:
其中 E1 是經(jīng)過放大的 DUT1 輸出信號,E2 是經(jīng)過放大和延遲的 DUT2 輸出信號,EC1 和 EC2 是信號功率,θM1 和 θM2 是相位噪聲的幅值,ωC 是載波頻率,ωM 是偏置頻率。應(yīng)用疊加,因此當(dāng)考慮來自外部源的相位噪聲時(shí),DUT 固有的相位噪聲可以忽略不計(jì)。如果 DUT1 和 DUT2 具有相同的超量相位傳遞功能,則由時(shí)鐘源和電源產(chǎn)生的 θM1 部分等于由公用時(shí)鐘源和電源產(chǎn)生的 θM2 部分。這種現(xiàn)象稱為電源牽引,可以簡單地通過以下方程式描述:
這樣,相位調(diào)制的幅度可由電源上的電壓噪聲與 KP 的乘積 - 電源牽引增益(弧度/V)得出。如果 DUT1 和 DUT2 具有等效的電源牽引增益,則理論上可以取消相位檢測器輸出處的這些噪聲源,從而只留下兩個(gè) DUT 的無關(guān)噪聲以進(jìn)行測量。
內(nèi)在的 DUT 噪聲可以通過一些額外的假設(shè)進(jìn)行確定。由于器件噪聲產(chǎn)生的 rms 相位誤差一般極小,因此我們可以使用小角度近似值將輸出載波的表達(dá)式改為:
相位檢測器的輸出已解調(diào),因此可以稱為“基帶信號”。一旦確定相位檢測器增益和輸入信號功率,即可計(jì)算出實(shí)際的相位噪聲(假設(shè)放大器產(chǎn)生的相位噪聲可以忽略不計(jì))。每個(gè) DUT 固有的噪聲是不相關(guān)的,所以它們產(chǎn)生的噪聲是相同的,并且 rms 總和為測得的輸出相位噪聲。為此,我們從頻譜分析儀測得的相位噪聲(單位:dBc/Hz)中減去 3 dB 以確定每個(gè) DUT 產(chǎn)生的噪聲。這表示相對于信號功率的相位噪聲功率:
當(dāng)進(jìn)行非常敏感的相位噪聲測量時(shí),放大器產(chǎn)生的噪聲可能是顯著的。放大器的殘余相位噪聲通過以下方法測量:從電路中拆除 DUT1 和 DUT2,然后對放大器直接應(yīng)用功率分配器輸出。放大器輸入信號功率必須在幅度和壓擺率方面與實(shí)際的 DUT 輸出信號相似。使用上述步驟,通過從測得的 DUT 相位噪聲中減去測得的放大器相位噪聲,即可得到精確的 DUT 相位噪聲。同樣,關(guān)鍵是要確保放大器的增益和噪聲指數(shù)彼此盡可能接近。
請注意,需要時(shí)鐘輸入信號的 DUT 將安裝一個(gè)具有一定噪聲的前端放大器。因此,由于放大器輸入處的閾值不確定性,具有低壓擺率的時(shí)鐘源可能會(huì)無意中增加 DUT 產(chǎn)生的相位噪聲。當(dāng)使用正弦時(shí)鐘源時(shí),請使用最大允許的幅值來最大化壓擺率。
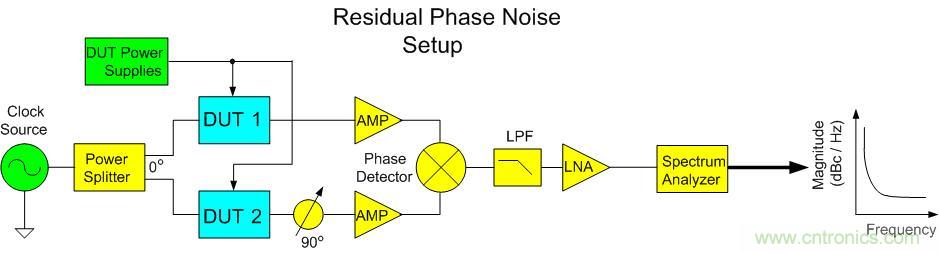
圖 1. 殘余相位噪聲測量裝置。
測試裝置的基本細(xì)節(jié)
使用圖 1 中所示的測試裝置,兩個(gè)具有相同零件號的 DUT 由單個(gè) 1 GHz 時(shí)鐘源定時(shí)。器件被設(shè)置為將時(shí)鐘頻率除以四以產(chǎn)生 250 MHz 的輸出。此外,兩個(gè)輸出信號進(jìn)行相對的相位移動(dòng) 90°(正交)以最小化出現(xiàn)在直流處的下轉(zhuǎn)換信號電平。DUT 信號由低噪聲放大器(LNA)放大,以增加測量系統(tǒng)的動(dòng)態(tài)范圍(放大器產(chǎn)生的相位噪聲可以小到忽略不計(jì))。放大器輸出被發(fā)送到均衡混頻器(相位檢測器)。相位檢測器將兩個(gè)信號混合,在其輸出處產(chǎn)生和積及差積。和積由低通濾波器濾除。剩余的差積構(gòu)成下轉(zhuǎn)換為直流(相位噪聲)的 250 MHz 輸出信號。LNA 提供足夠的增益以克服頻譜分析儀的本底噪聲限制。
公用時(shí)鐘源相位噪聲的消除
圖 2 顯示了兩個(gè)時(shí)鐘源(具有極其不同的相位噪聲特性)的絕對相位噪聲測量。從理論上講,任一時(shí)鐘源均不會(huì)影響由殘余相位噪聲裝置測得的 DUT 相加相位噪聲。圖 3 確認(rèn)了這一理論。它繪制了兩個(gè)單獨(dú)的殘余相位噪聲測量,每個(gè)時(shí)鐘源有一個(gè)軌跡曲線。兩個(gè)軌跡曲線幾乎重疊,證明了公用時(shí)鐘源噪聲已由殘余相位噪聲裝置消除。在絕對相位噪聲裝置中,此噪聲將不會(huì)消除。事實(shí)上,如果 DUT 是理想的(無相加相位噪聲),則其絕對相位噪聲曲線將與圖 2 中的曲線相匹配(但由于四分之一 的頻率轉(zhuǎn)換,它會(huì)低 12 dB)。時(shí)鐘源 2 在正?;?250-MHz 載波后,展現(xiàn)出 –92 dBc/Hz 的相位噪聲(1 kHz 偏置時(shí)),而測得的與時(shí)鐘源 2 相關(guān)的 DUT 相位噪聲為 –135 dBc/Hz(1 kHz 時(shí))。因此,殘余相位測量抑制了大約 40 dB 的輸入時(shí)鐘相位噪聲。
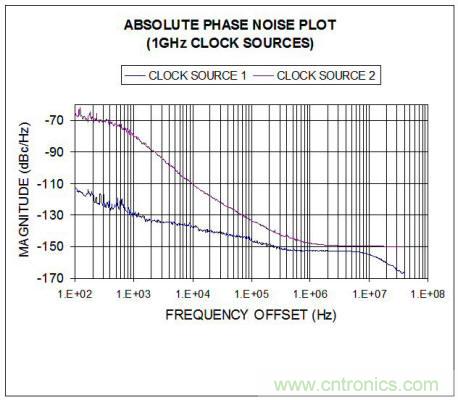
圖 2. 兩個(gè)不同時(shí)鐘源的絕對相位噪聲測量值。
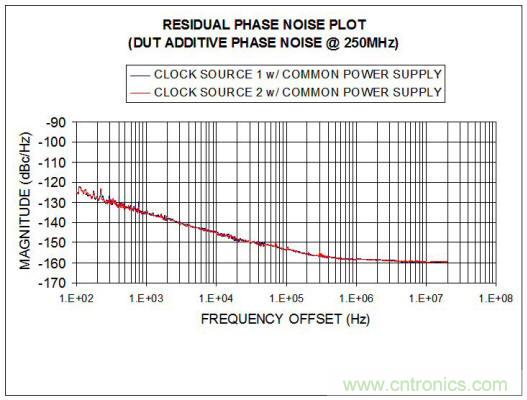
圖 3. 時(shí)鐘源幾乎對殘余相位噪聲測量值無影響。
公用電源噪聲的消除
圖 3 中使用了與圖 1 相同的公用電源連接。圖 4 顯示了為每個(gè) DUT 使用單獨(dú)噪聲電源的影響。不相關(guān)的電源噪聲會(huì)導(dǎo)致近載波相位噪聲大幅增加。
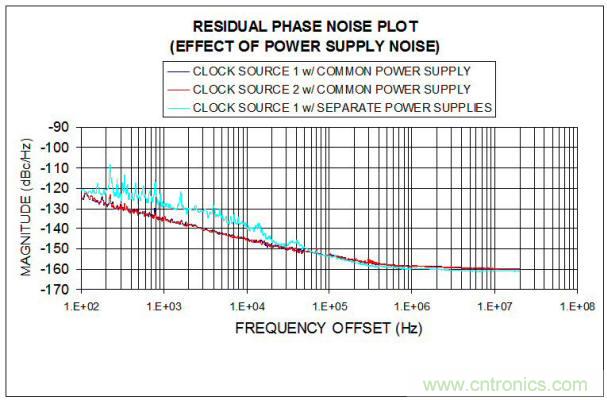
圖 4. 殘余相位噪聲測量顯示公用和單獨(dú)電源的影響。
圖 5 顯示了使用低噪聲電源時(shí)的絕對相位噪聲測量。具有低噪聲電源的絕對相位噪聲與具有單獨(dú)低噪聲電源的殘余相位噪聲展現(xiàn)出了良好的一致性。已在殘余相位噪聲測量中消除了電源相位噪聲,但在絕對相位噪聲測量中并沒有消除電源相位噪聲。
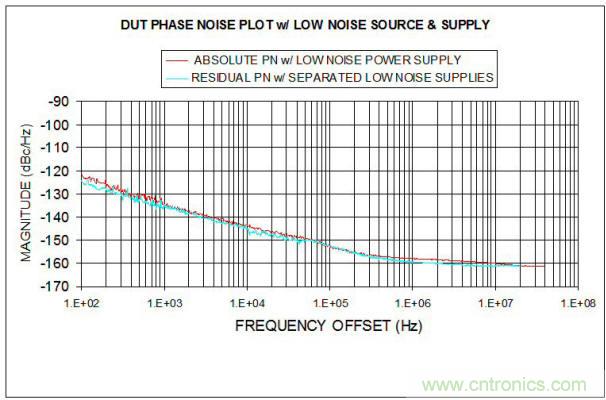
圖 5. 近載波相位噪聲因低噪聲電源而得到了改善
殘余相位噪聲測量法是一個(gè)非常有用的技術(shù),它用于識別作為系統(tǒng)設(shè)計(jì)一部分的單個(gè)元件所產(chǎn)生的相位噪聲。使用這種方法,外部噪聲源(例如輸入時(shí)鐘和電源)在每個(gè) DUT 的輸出處相關(guān)聯(lián),因此可以有效地消除。此外,它還可能說明 DUT 殘余噪聲測量中使用的緩沖器或放大器所產(chǎn)生的相位噪聲,方法是對這些元件進(jìn)行附加的殘余相位噪聲測量。組合使用殘余和絕對相位噪聲測量法是識別系統(tǒng)設(shè)計(jì)中主要噪聲源的一個(gè)非常有效的方法。在分頻器上獲得的測量數(shù)據(jù)展示了殘余相位噪聲測量法的概念和效用,并且量化了噪聲輸入時(shí)鐘和電源的影響。借助這一評估方法,系統(tǒng)設(shè)計(jì)師可以根據(jù)實(shí)際的測量數(shù)據(jù)得出輸入時(shí)鐘源和電源的規(guī)格。
推薦閱讀:

