
【導(dǎo)讀】人們生活對(duì)智能化要求的提高也促進(jìn)了機(jī)器人的發(fā)展,在這樣的背景下,機(jī)器人技術(shù)的發(fā)展可以說(shuō)是一日千里,未來(lái)機(jī)器人將在以下技術(shù)的基礎(chǔ)上飛速發(fā)展。本文盤點(diǎn)了關(guān)于機(jī)器人未來(lái)十大關(guān)鍵技術(shù)發(fā)展趨勢(shì),供大家學(xué)習(xí)了解。
當(dāng)前各個(gè)國(guó)家對(duì)機(jī)器人技術(shù)都是非常的重視,人們生活對(duì)智能化要求的提高也促進(jìn)了機(jī)器人的發(fā)展,在這樣的背景下,機(jī)器人技術(shù)的發(fā)展可以說(shuō)是一日千里,未來(lái)機(jī)器人將在以下技術(shù)的基礎(chǔ)上飛速發(fā)展。
人機(jī)交互技術(shù)
東芝在本周舉辦的 Cutting-EdgeIT& Electronics Comprehensive Exhibition (CEATEC)展會(huì)上發(fā)布了一款全新人形交互機(jī)器人,而其最大特色就是可以通過(guò)手語(yǔ)與人交流。

據(jù)悉,多虧了關(guān)節(jié)中內(nèi)置的43個(gè)電動(dòng)機(jī),這個(gè)名叫 AikoChihira 的女性角色機(jī)器人的肢體運(yùn)動(dòng)相當(dāng)自然流暢,這也讓手語(yǔ)表達(dá)成為了可能。不過(guò),機(jī)器人動(dòng)作模擬技術(shù)目前還存在諸多限制,東芝計(jì)劃在2020年以前推出更為全面智能的手語(yǔ)交互機(jī)器人,而實(shí)現(xiàn)這個(gè)目標(biāo)就必須將語(yǔ)言表達(dá)、語(yǔ)音識(shí)別、動(dòng)作控制等多個(gè)系統(tǒng)完美結(jié)合在一起。值得一提的是,AikoChihira 計(jì)劃的最終目標(biāo)是為老人以及老年癡呆癥患者提供服務(wù),在陪伴他們的同時(shí)還能幫助醫(yī)護(hù)人員或者其親人進(jìn)行實(shí)時(shí)監(jiān)護(hù)。
除了東芝以外,很多科研機(jī)構(gòu)也參與了AikoChihira 計(jì)劃。東芝已經(jīng)和大阪大學(xué)展開了深入合作,而后者則一直致力于人形機(jī)器人的設(shè)計(jì)和開發(fā)工作,所以AikoChihira 才會(huì)看起來(lái)如此真實(shí)。另外,芝浦科技學(xué)院和湘南工科大學(xué)在運(yùn)動(dòng)傳感器技術(shù)和機(jī)器人驅(qū)動(dòng)技術(shù)方面也給予該項(xiàng)目很大幫助,而東芝則創(chuàng)建了AikoChihira 的運(yùn)動(dòng)控制與協(xié)調(diào)算法。
有感情的機(jī)器人:讀懂表情
許多機(jī)器人的存在只是為了完成某些工作或特定的任務(wù),有“情感”的機(jī)器人相信大家都只在電影中才會(huì)見(jiàn)到。來(lái)自東南大學(xué)機(jī)器人傳感控制實(shí)驗(yàn)室的吳涓教授透露說(shuō),該實(shí)驗(yàn)室的研究團(tuán)隊(duì)已完成了情感交互機(jī)器人的初步設(shè)計(jì)。
一般來(lái)說(shuō),當(dāng)人和機(jī)器人接觸的時(shí)候,由于機(jī)器缺乏可辨認(rèn)的性格,因此和人沒(méi)有情感的互動(dòng)。吳涓表示,其實(shí)只要把人的表情、動(dòng)作的特定的信號(hào)提取出來(lái),再交給機(jī)器人,那么它就會(huì)識(shí)別人的表情,辨別別人對(duì)它的動(dòng)作到底是粗暴還是友好,從而做出相應(yīng)的反應(yīng),可以與人的情感形成互動(dòng)。

經(jīng)初步設(shè)計(jì),這個(gè)機(jī)器人通過(guò)提取人的嘴部、眼睛的幾十個(gè)甚至數(shù)百個(gè)關(guān)鍵點(diǎn)的數(shù)據(jù)信號(hào),從而能夠非常準(zhǔn)確地讀懂人的高興、憤怒、憂傷等種種表情,并將它們模擬出來(lái)。通過(guò)感覺(jué)、觸覺(jué)的設(shè)計(jì),該機(jī)器人也能夠分辨對(duì)它進(jìn)行的是撫摸還是按壓、打擊等動(dòng)作,如果對(duì)它撫摸,它會(huì)開心地笑,如果對(duì)它打壓,它則會(huì)表現(xiàn)出很憂傷,是個(gè)有感情的機(jī)器人。
吳涓分析說(shuō),由于目前對(duì)于人的情感的科學(xué)基礎(chǔ)研究還不夠,因此目前研究出來(lái)的情感交互機(jī)器人其實(shí)和真人的情感交互還有很大的距離,它只是能夠識(shí)別一些簡(jiǎn)單的表情,對(duì)于動(dòng)作的識(shí)別也局 限于一些固定的動(dòng)作,但是未來(lái)隨著人機(jī)交互技術(shù)的進(jìn)一步發(fā)展,我們和機(jī)器人的“情感”交流將會(huì)越來(lái)越順暢。
[page]
軟體機(jī)器人控制技術(shù)
機(jī)器人在大部分人眼里一直都是像擎天柱一樣的鋼筋鐵骨,不過(guò)事實(shí)并不總是這個(gè)樣子的。最近,來(lái)自美國(guó)普渡大學(xué)的研究人員就發(fā)明了一種由輕質(zhì)惰性泡沫材料制成的軟體機(jī)器人,為了讓它像機(jī)器手臂一樣可以自由彎曲,研究人員還在在泡沫材料的表面覆蓋了一層特殊的“衣服”,而這層聚合物纖維在受熱的情況下可以自由改變形狀和堅(jiān)硬度,作用就如同附著在骨骼上的肌肉一般。
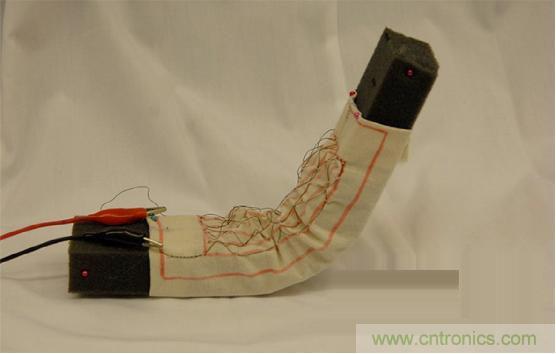
該項(xiàng)目的負(fù)責(zé)人稱,這種能夠變形收縮的機(jī)械纖維將被廣泛用于機(jī)器人領(lǐng)域,而他們也有計(jì)劃以此為基礎(chǔ)研制新型飛行機(jī)器人。另外,由于成本低重量輕,機(jī)械纖維機(jī)器人十分適合用于太空探索,要知道每多將一克物質(zhì)送上太空,整個(gè)發(fā)射成本都會(huì)顯著增加,而美國(guó)航空航天局也已經(jīng)開始著手研究這類軟體機(jī)器人。不僅如此,對(duì)于醫(yī)療領(lǐng)域來(lái)說(shuō)機(jī)械纖維也是一種極好的材料,比如可以制成骨折病人的外固定支架,在提高固定效果的基礎(chǔ)上又減輕了患者的負(fù)擔(dān)。
液態(tài)金屬控制技術(shù)
據(jù)英國(guó)《每日郵報(bào)》9月23日?qǐng)?bào)道,美國(guó)北卡羅來(lái)納州一個(gè)科研團(tuán)隊(duì)日前研發(fā)出一種可進(jìn)行自我修復(fù)的變形液態(tài)金屬,距離打造“終結(jié)者”變形機(jī)器人的目標(biāo)更進(jìn)一步。
科學(xué)家們使用鎵和銦合金合成液態(tài)金屬,形成一種固溶合金,在室溫下就可以成為液態(tài),表面張力為每米500毫牛頓。這意味著,在不受外力情況下,當(dāng)這種合金被放在平坦桌面上時(shí)會(huì)保持一個(gè)幾乎完美的圓球不變。當(dāng)通過(guò)少量電流刺激后,球體表面張力會(huì)降低,金屬會(huì)在桌面上伸展。這一過(guò)程是可逆的:如果電荷從負(fù)轉(zhuǎn)正,液態(tài)金屬就會(huì)重新成為球狀。更改電壓大小還可以調(diào)整金屬表面張力和金屬塊粘度,從而令其變?yōu)椴煌Y(jié)構(gòu)。
北卡羅來(lái)納州立大學(xué)副教授邁克爾·迪基(MichaelDickey )說(shuō):“只需要不到一伏特的電壓就可改變金屬表面張力,這種改變是相當(dāng)了不起的。我們可以利用這種技術(shù)控制液態(tài)金屬的活動(dòng),從而改變天線形狀、連接或斷開電路等。”
此外,這項(xiàng)研究還可以用于幫助修復(fù)人類切斷的神經(jīng),以避免長(zhǎng)期殘疾。研究人員宣稱,該突破有助于建造更好的電路、自我修復(fù)式結(jié)構(gòu),甚至有一天可用來(lái)制造《終結(jié)者》中的T-1000機(jī)器人。
[page]
機(jī)器人生物行走技術(shù)
新一代微型生物機(jī)器人能收縮肌肉。美國(guó)伊利諾斯大學(xué)厄本那香檳分校工程師展示了一類行走“生物機(jī)器人”(bio-bots ),由肌肉細(xì)胞推動(dòng)、電脈沖控制,研究人員能對(duì)其發(fā)號(hào)施令。相關(guān)論文在線發(fā)表于最近的美國(guó)《國(guó)家科學(xué)院學(xué)報(bào)》上。
“不管你想制造任何種類的生物機(jī)器人,由細(xì)胞驅(qū)動(dòng)的生物刺激都是一項(xiàng)基本要求。”負(fù)責(zé)這項(xiàng)研究的伊利諾斯大學(xué)厄本那香檳分校生物工程主管拉什德·巴什爾說(shuō),“我們正在把工程原理與生物學(xué)整合在一起,設(shè)計(jì)開發(fā)生物機(jī)器人和用于環(huán)境、醫(yī)療方面的系統(tǒng)。生物學(xué)非常強(qiáng)大,如果我們能學(xué)習(xí)利用其優(yōu)勢(shì),將帶來(lái)許多好東西。”
巴什爾小組用3D打印技術(shù)造出一種柔韌的水凝膠和活細(xì)胞組成的生物機(jī)器人。以前,他們也曾用跳動(dòng)的小鼠心臟細(xì)胞造出一種能自己“行走”的生物機(jī)器人,但心臟細(xì)胞不停地收縮,讓他們無(wú)法控制機(jī)器人的運(yùn)動(dòng)。因此要用心臟細(xì)胞來(lái)設(shè)計(jì)生物機(jī)器人是很困難的,它不能隨意開關(guān)、加快或減慢速度。

新設(shè)計(jì)的生物機(jī)器人受自然的肌腱骨骼啟發(fā)。據(jù)物理學(xué)家組織網(wǎng)近日?qǐng)?bào)道,他們用3D打印水凝膠制成主骨,既能支持生物結(jié)構(gòu),又能像關(guān)節(jié)一樣彎曲。再把一條肌肉錨在主骨上,就像肌腱把肌肉附著在骨骼上。生物機(jī)器人的速度由電脈沖頻率來(lái)控制,頻率越高,肌肉收縮越快,生物機(jī)器人也就走得越快。
“骨骼肌細(xì)胞很有吸引力,你可以用外部信號(hào)來(lái)調(diào)整它的步調(diào)。”巴什爾說(shuō),“比如設(shè)計(jì)一種設(shè)備,讓它能在感覺(jué)到某種化學(xué)物質(zhì)或接到某個(gè)信號(hào)時(shí)開始工作,可以使用骨骼肌。我們把它作為設(shè)計(jì)工具之一,工程師在設(shè)計(jì)時(shí),還有不同的方案。”
“這完全是自然的,我們的研究基于仿生設(shè)計(jì)原則,如肌肉骨骼系統(tǒng)的自組織。”論文第一作者、研究生卡洛琳·茨威特科維奇說(shuō),“本成果代表了生物機(jī)器開發(fā)與控制方面的重要一步,能夠刺激、訓(xùn)練或培養(yǎng)它們來(lái)工作。這種系統(tǒng)最終可能發(fā)展成一代生物器,用于藥物遞送、手術(shù)機(jī)器人、‘智能’移植、移動(dòng)環(huán)境分析器等。”
下一步,研究人員將加強(qiáng)對(duì)生物器運(yùn)動(dòng)的控制,像集成神經(jīng)元那樣,用光或化學(xué)物質(zhì)控制生物器向不同方向運(yùn)動(dòng)。“我們的目標(biāo)是把這些設(shè)備用作‘自主傳感器’。”巴什爾說(shuō),“比如,讓它能感覺(jué)到某種化學(xué)物質(zhì),朝它運(yùn)動(dòng)并釋放中和劑。刺激控制生物器是向此目標(biāo)邁進(jìn)的一大步。
機(jī)器人透視技術(shù)
據(jù)國(guó)外媒體報(bào)道,目前,美國(guó)加州大學(xué)最新研制一款具有“透視眼”能力的機(jī)器人,在兩個(gè)機(jī)器人之間釋放無(wú)線信號(hào),通過(guò)測(cè)量信號(hào)強(qiáng)度的變化,將觀察發(fā)現(xiàn)墻壁內(nèi)部的物體。該技術(shù)可用于尋找困陷在建筑物中的傷員,或者監(jiān)控家中的老年人。
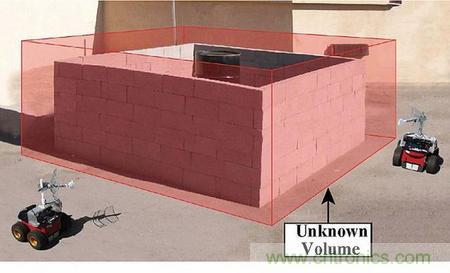
該系統(tǒng)是由美國(guó)加州大學(xué)科學(xué)家YasaminMostofi 博士最新研制的,這兩個(gè)機(jī)器人裝配著輪子,一個(gè)釋放無(wú)線信號(hào),另一個(gè)探測(cè)接收信號(hào)強(qiáng)度。
當(dāng)機(jī)器人環(huán)繞正方形混凝土建筑物時(shí),彼此離開視線范圍之內(nèi),它們能夠計(jì)算出建筑物內(nèi)部的事物,甚至可以識(shí)別出人類。其工作原理是當(dāng)途經(jīng)墻壁和其它物體時(shí),測(cè)量信號(hào)強(qiáng)度的衰減程度。
通過(guò)測(cè)量無(wú)線信號(hào)的衰減情況,機(jī)器人可以繪制一張視覺(jué)地圖,呈現(xiàn)觀測(cè)大約100秒的透視景象。研究人員指出,這項(xiàng)研究結(jié)果非常令人滿意,誤差不超過(guò)5厘米。
研究小組表示,我們的目標(biāo)僅是使用無(wú)線信號(hào)透視厚墻壁觀察完全未知區(qū)域。這項(xiàng)技術(shù)可由任何無(wú)線激活裝置實(shí)現(xiàn),目前我們賦予機(jī)器人“透視眼”功能。
雖然一些現(xiàn)代無(wú)人操控機(jī)器人使用激光掃描器觀察前方的物體,但卻不能透視鄰近的物體或者墻壁。研究人員指出,這項(xiàng)最新技術(shù)將是機(jī)器人運(yùn)動(dòng)設(shè)計(jì)的革命性創(chuàng)新,賦予無(wú)人操控機(jī)器人一些新的功能。
他們認(rèn)為這項(xiàng)技術(shù)潛在廣泛應(yīng)用,其中包括:地震災(zāi)難之后的搜尋和營(yíng)救工作。“透視眼機(jī)器人”無(wú)需挖掘便能檢測(cè)探索考古遺址。
[page]
敏感觸控技術(shù)
不要以為機(jī)器人的敏感度很差。美國(guó)麻省理工學(xué)院(Massachusetts Institute of Technology, MIT )視覺(jué)科學(xué)學(xué)科聯(lián)合波士頓東北大學(xué)研究團(tuán)隊(duì)近日成功研制了一種觸覺(jué)傳感器GelSight ,比人類的手指更加靈活敏感。
此次麻省理工學(xué)院及東北大學(xué)聯(lián)合研究團(tuán)隊(duì)開發(fā)的“機(jī)器人手指?jìng)鞲衅?rdquo;突破了此前機(jī)器人手部關(guān)節(jié)不靈敏等限制,甚至比人類手指更加靈活敏感,因此受到了各界矚目。該傳感器不是以機(jī)器來(lái)辨識(shí)觸覺(jué),而是以3D視覺(jué)實(shí)時(shí)定位物體的方位,以實(shí)現(xiàn)對(duì)物體的識(shí)別和傳感。

據(jù)悉這種技術(shù)比人類的手部觸覺(jué)靈敏約100倍。 GelSight 內(nèi)置有紅色、黃色、白色、藍(lán)色等照明設(shè)備, GelSight 可根據(jù)指示的信號(hào)迅速做出反應(yīng),根據(jù)麻省理工學(xué)院方面公開的演示視頻更可直觀的感受到 GelSight 的強(qiáng)大功能。裝置了 GelSight 傳感器的機(jī)器人可輕松拔出裝置在電腦上的USB,但未裝置 GelSight 的機(jī)器人則無(wú)法完成該動(dòng)作。
據(jù)悉, GelSight 最大的特征在于,最快的辨識(shí)物體的視覺(jué)信號(hào),并馬上將其轉(zhuǎn)化為觸覺(jué)信號(hào)。
機(jī)器人用可伸縮電線
日本綜合型化學(xué)企業(yè)旭化成將于9月1日發(fā)售可以像橡皮筋那樣伸縮的電線?!度毡窘?jīng)濟(jì)新聞》8月26日?qǐng)?bào)道說(shuō),通過(guò)在具有彈性的聚氨酯纖維(中國(guó)稱:氨綸) 中以螺旋狀嵌入可通電的導(dǎo)線,使得電線可以伸縮,且不易出現(xiàn)松弛。與容易松弛的以往電線相比,自由自在的變形將成為可能。旭化成力爭(zhēng)將這種電線應(yīng)用于實(shí)現(xiàn)復(fù)雜動(dòng)作的擬人機(jī)器人和穿戴型輔助機(jī)器人。

該電線由旭化成其旗下子公司、從事紡織業(yè)務(wù)的旭化成紡織公司開發(fā)。在拉伸時(shí)可以伸長(zhǎng)至1.4倍,同時(shí)在反復(fù)彎曲直至斷線的耐久性方面也是以往產(chǎn)品的10-100倍。
以樹脂材料作為保護(hù)的一般電線在用于機(jī)器人時(shí),在手腕做彎曲動(dòng)作等的情形下,容易形成松弛或纏繞。而旭化成開發(fā)的這種伸縮性電線將可以依照其實(shí)施的擬人動(dòng)作合理布線。
首先,面向彎曲部分使用電線的工業(yè)機(jī)器人,旭化成將開拓以往產(chǎn)品的替代性需求。該公司將以“ROBODEN” (意為機(jī)器人電線)的產(chǎn)品名,通過(guò)米思米集團(tuán)總部的電子商務(wù)網(wǎng)站銷售。在價(jià)格方面,1米以內(nèi)長(zhǎng)度為3萬(wàn)日元(約合人民幣1772元)左右。旭化成計(jì)劃向電子企業(yè)和精密機(jī)械企業(yè)等銷售,力爭(zhēng)3年內(nèi)實(shí)現(xiàn)3億日元左右的銷售額。
[page]
機(jī)器人可自行組隊(duì)技術(shù)
相信對(duì)于有密集恐懼癥的人來(lái)說(shuō),看到1000只排得密密麻麻的小機(jī)器人在桌面上一起移動(dòng)絕對(duì)不會(huì)感到好受。不過(guò)這仍無(wú)法阻礙哈佛大學(xué)的工程師們打造這樣的系統(tǒng)。據(jù)悉,研究團(tuán)隊(duì)使用了1000只組裝簡(jiǎn)易的小型機(jī)器人,每個(gè)造價(jià)20美元。 據(jù)介紹,每組裝一個(gè)這樣的機(jī)器人需要5分鐘的時(shí)間,也就是,他們花費(fèi)了83多個(gè)小時(shí)完成了這項(xiàng)艱巨的任務(wù)。

之后,他們?yōu)檫@些小小的機(jī)器人提供了多套算法,這樣它們就能移動(dòng)形成多種形狀。
團(tuán)隊(duì)負(fù)責(zé)人、哈佛大學(xué)電子工程師Michael Rubestein 介紹道:“我們打造了一群機(jī)器人版的 蜂群 ,它專門以大部隊(duì)的形式工作。不過(guò)(這套系統(tǒng))也存有一個(gè)缺陷,那就是機(jī)器人的功能性并不強(qiáng)大,并且還有諸如噪音距離傳感及移動(dòng)困難等多個(gè)可變因素。”Rubenstein 表示,他們希望打造一套可以完成復(fù)雜全局任務(wù)的機(jī)器人“蜂群”。
目前,這套系統(tǒng)面臨的最大問(wèn)題并不是組裝所需花費(fèi)的時(shí)間,而是如何開發(fā)出一套可以精準(zhǔn)控制這群小機(jī)器人的算法。
就目前來(lái)看,現(xiàn)在這套系統(tǒng)更多的像是機(jī)器人對(duì)自己的編程控制,而不是執(zhí)行一個(gè)可讓人類受益的任務(wù)。另外,Rubenstein 表示,他們未來(lái)將可能用更小的機(jī)器人打造一個(gè)更大的“蜂群”,進(jìn)而了解控制體積更小機(jī)器人的方法。
造房子機(jī)器人:或成為未來(lái)主流
一個(gè)被稱為Minibuilders的全新3D打印建筑機(jī)器人套件,可以像建筑工人那樣3D打印出一間房屋,其快速、低價(jià)、安全讓建筑機(jī)器人將有可能成為下一代強(qiáng)大的建筑必備工具。
其運(yùn)作方式基本上和同類型的無(wú)人建筑機(jī)器人一樣,逐層澆筑流體建筑材料。但是它最大的不同,就是可以打印的建筑體積更大,而且設(shè)計(jì)方法也與眾不同。
這套系統(tǒng)的核心是一個(gè)龐大的主部件,有兩個(gè)裝有液化合成大理石的大型圓筒,大理石經(jīng)獨(dú)特的配方制成。氣胎注射筒會(huì)通過(guò)長(zhǎng)長(zhǎng)的管子推動(dòng)材料,那些管子將被安置在一個(gè)建筑工地上,與三個(gè)敏捷的專業(yè)附屬機(jī)器人協(xié)同工作。有些研究人員會(huì)覺(jué)得自己就像是一個(gè)建筑師,把自己的建筑構(gòu)想通過(guò)一個(gè)巨大的獨(dú)立機(jī)器變成現(xiàn) 實(shí),而Minibuilders的團(tuán)隊(duì)扮演角色就像是一個(gè)“包工頭”,在建設(shè)過(guò)程中“招募”各相關(guān)領(lǐng)域里的建筑專業(yè)資源。

和構(gòu)建傳統(tǒng)建筑物一樣,建筑流程需要從一個(gè)堅(jiān)實(shí)的地基開始。“地基機(jī)器人”是一臺(tái)裝配了傳感器的設(shè)備,可以沿著地上標(biāo)記的線進(jìn)行工作。建筑師可以在建筑臺(tái)上面先勾勒出建筑的輪廓,然后地基機(jī)器人就開始進(jìn)行連續(xù)螺旋式循環(huán),澆筑好前20層建筑材料。基本上,我們可以把這個(gè)地基機(jī)器人看作是一個(gè)從底層開始堆積建筑材料的“建筑師”。
一旦地基鋪好,建筑工人可以把一個(gè)“抓握機(jī)器人”緊夾在地基上面,它和地基緊密的黏合在一起,瞬間就能變成從世界上最先進(jìn)的 “小鏟刀”。
抓握機(jī)器人的噴嘴可以水平移動(dòng),使用更多材料在地基基礎(chǔ)上來(lái)創(chuàng)造建筑,它還可以在建筑物上面增加動(dòng)態(tài)紋理。在澆筑一層全新材料的時(shí)候,為了加速材料的干燥固化速度,抓握機(jī)器人還配置了一對(duì)加熱器,這對(duì)加熱器可以吹出熱風(fēng),熱固大理石混合。由于材料堅(jiān)硬,支持在水平方向進(jìn)行擴(kuò)展,因而機(jī)器人可以打印屋頂或其他懸臂結(jié)構(gòu)。
可以肯定的是,Minibuilders將在未來(lái)建筑機(jī)器人領(lǐng)域里扮演一個(gè)非常重要的角色。
