
【導讀】大家都很熟悉了傳統(tǒng)的步進電機控制方式。如果在電機控制中采用反饋裝置或者無傳感器控制方式,將可以為那些對安全性、可靠性和精度有較高要求的運動控制應用提供更經(jīng)濟的選擇。
大部分基于步進電機的運動系統(tǒng)運行在開環(huán)狀態(tài)下,因此能夠提供低成本的解決方案。實際上,步進系統(tǒng)是唯一的一個不需反饋就具備位置控制能力的運動技術。但是當步進電機以開環(huán)方式驅動負載時,在指令步和實際步之間存在失去同步的潛在可能性。閉環(huán)控制作為傳統(tǒng)步進運動控制的補充,為有更高安全性、可靠性或產品質量要求的應用提供了高性價比的選擇。反饋裝置或某種間接參數(shù)檢測方式在這類步進系統(tǒng)中“閉合了回路”,以校驗/控制失步、檢測電機堵轉,并保證了更大的有效力矩輸出。最近,步進閉環(huán)控制(CLC)在實現(xiàn)智能分布式運動體系結構方面也發(fā)揮了作用。本文稱之帶編碼器步進電機為步進伺服電機。
我們知道伺服電機也是帶編碼器并依靠編碼器工作。但是增加編碼器的步進伺服會兼有步進電機和伺服電機兩者優(yōu)點。
相比伺服電機,閉環(huán)步進電機有以下優(yōu)點
1 可頻繁的起動/停止
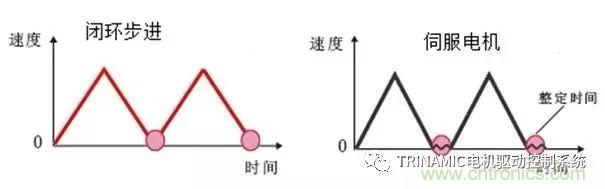
步進伺服最適用于需要頻繁起動/停止的用途
2 免增益調整
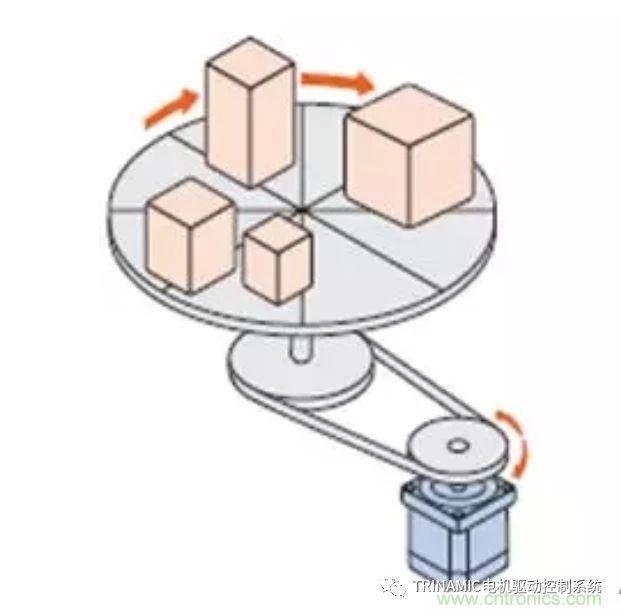
即使是在皮帶機構、凸輪、鏈條驅動等負載發(fā)生變動的情況下,也可不用通過增益調節(jié),便實現(xiàn)定位。而伺服電機中伺服系統(tǒng)的增益對電機性能有很大影響,而且調節(jié)伺服增益是很費時又費力的事情。
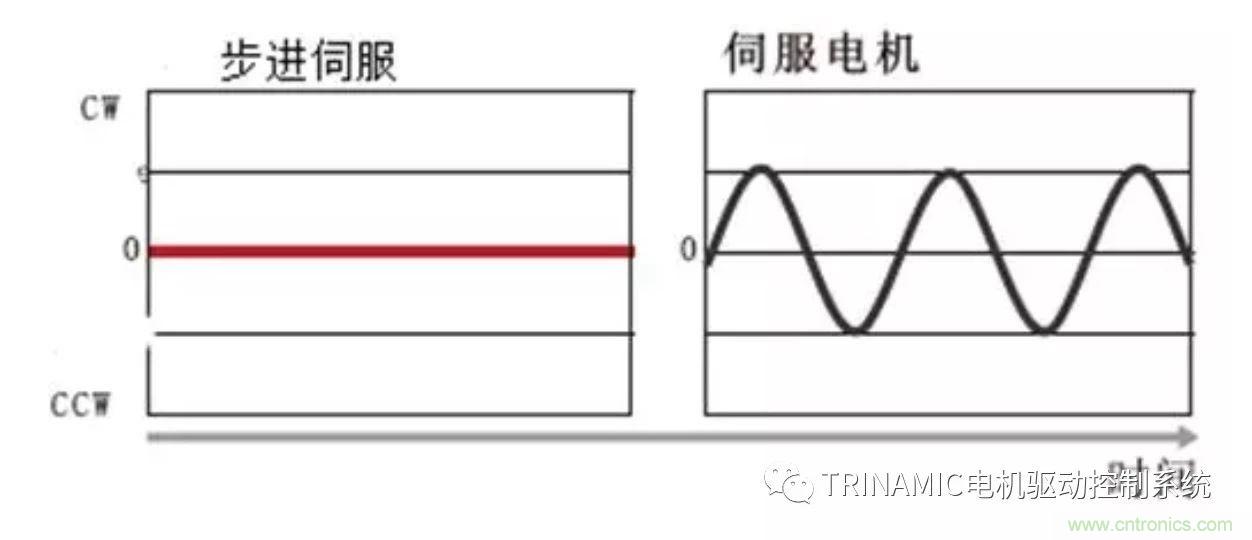
3 穩(wěn)態(tài)靜止,無抖動
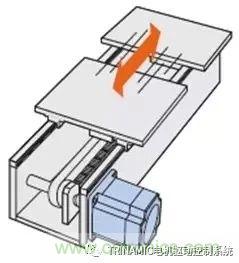
伺服電機在停止時候由于依靠編碼器定位需要增益調節(jié)因此無法做到絕對靜止。而步進伺服電機定位時無微小振動而通過電機自身保持力停止因此最適合用于需無振動停止的低剛性機構用途,典型應用如光學領域。
4 可實現(xiàn)大慣性負載的驅動
比起同等安裝尺寸的伺服電機,步進伺服可驅動更大慣性的負載。
5 高速
得益于連續(xù)穩(wěn)定可靠的電流控制技術,閉環(huán)步進電機可運行到3000-4000RPM不丟步。
6 高響應
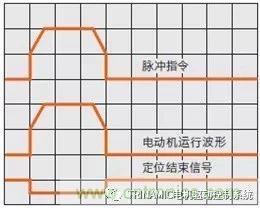
與開環(huán)步進電機一樣,閉環(huán)步進電機與控制指令同步運行,因此能夠在短行程、短時間完成精確定位。而通常伺服電機由于在停止時有位置整定時間不適應短行程定位場合。
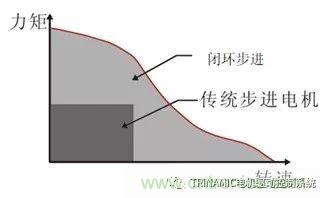
7 大力矩
與傳統(tǒng)的步進電機相比,閉環(huán)步進電機可以在非常寬的速度范圍內輸出很大的力矩,驅動可以做到100%的負載連續(xù)運行。無需擔心電機驅動負載的能力,這與傳統(tǒng)的微步(細分)驅動完全不同。步進伺服可以根據(jù)電機的轉速采用獨特電流控制技術做到高速范圍內依舊可以輸出大力矩。配合Trinamic的CoolStep和Dcstep驅動器的輸出電流會隨著外部負載閉環(huán)動態(tài)增加或減少。
8 低速無振動,靜音
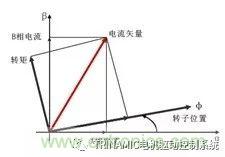
由于驅動器采用了矢量控制技術,加之Trinamic特有的StealthChop和SpreadCycle專利技術可以保證電機低速時候無振動,靜音效果。
9 減少電機發(fā)熱,實現(xiàn)高效率
閉環(huán)步進加之Trinamic特有的CoolStep技術(電流隨負載動態(tài)調節(jié)),因此能減少電機發(fā)熱,降低電機運行溫度,提高效率、節(jié)能。
傳統(tǒng)閉環(huán)步進解決方法如下
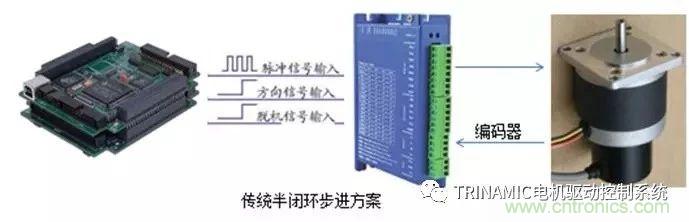
傳統(tǒng)的閉環(huán)方式是控制器、驅動器、電機分體式,控制器發(fā)出脈沖/方向控制驅動器,步進電機將編碼器信號反饋到驅動器。缺點是:接線繁瑣、售后服務不便、脈沖/方向控制信號容易受到強磁場干擾導致定位不準、編碼器信號只反饋到驅動器屬于半閉環(huán),無法檢測控制部分的脈沖丟失。
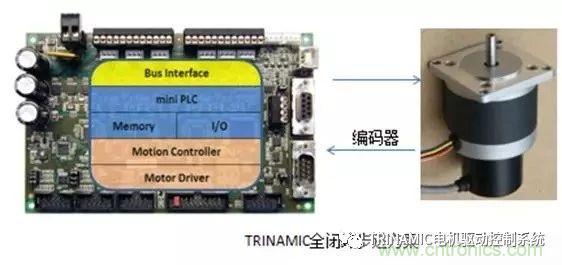
Trinamic采用的是全位置閉環(huán)控制模式,模塊集成了總線接口、運動控制功能、輸入輸出、電機驅動和程序存儲。編碼器的信號反饋到模塊里面模塊內部完成閉環(huán)控制。
優(yōu)勢
布線簡單、全位置閉環(huán)控制精確、售后維護方便。
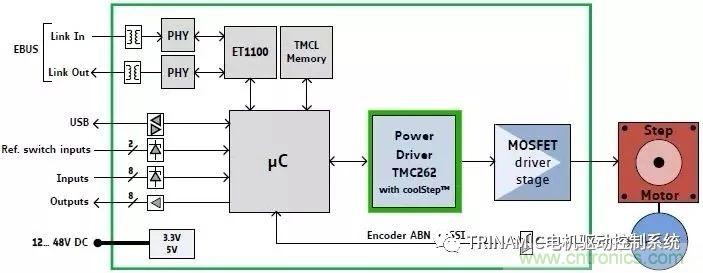
單軸閉環(huán)驅控模塊

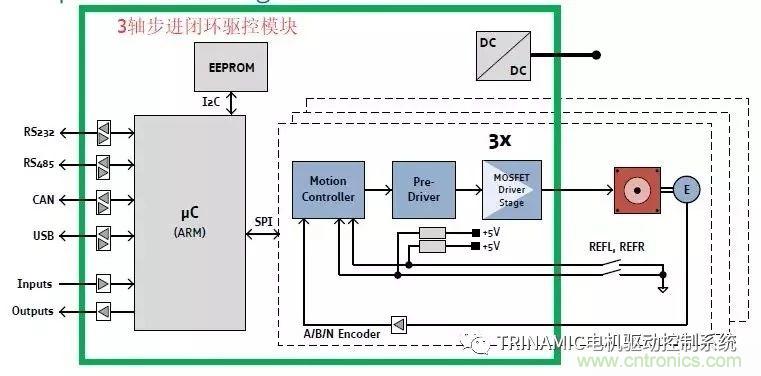
3軸閉環(huán)驅控模塊

推薦閱讀:

