
【導(dǎo)讀】無(wú)刷直流電機(jī)(或簡(jiǎn)稱(chēng) BLDC電機(jī))是一種采用直流電源并通過(guò)外部電機(jī)控制器控制實(shí)現(xiàn)電子換向的電機(jī)。不同于有刷電機(jī),BLDC 電機(jī)依靠外部控制器來(lái)實(shí)現(xiàn)換向。簡(jiǎn)言之,換向就是切換電機(jī)各相中的電流以產(chǎn)生運(yùn)動(dòng)的過(guò)程。有刷電機(jī)是指具有物理電刷的電機(jī),其每轉(zhuǎn)一次可實(shí)現(xiàn)兩次換向過(guò)程,而 BLDC 電機(jī)無(wú)電刷配備,因此而得名。由于其設(shè)計(jì)特性,無(wú)刷電機(jī)能夠?qū)崿F(xiàn)任意數(shù)量的換向磁極對(duì)。
與傳統(tǒng)有刷電機(jī)相比,BLDC 電機(jī)具有極大的優(yōu)勢(shì)。這種電機(jī)的效率通??商岣?15-20%;沒(méi)有電刷物理磨損,因而能減少維護(hù);無(wú)論在什么額定速度下都可以獲得平坦的轉(zhuǎn)矩曲線。
雖然 BLDC 電機(jī)并不是新發(fā)明,但由于需要復(fù)雜控制和反饋電路,所以廣泛采用的進(jìn)展較為緩慢。然而,由于近期半導(dǎo)體技術(shù)的發(fā)展、永磁體品質(zhì)提升,以及對(duì)更高效率不斷增長(zhǎng)的需求,促使 BLDC 電機(jī)在大量應(yīng)用中取代了有刷電機(jī)。BLDC 電機(jī)在許多行業(yè)找到了市場(chǎng)定位,包括白色家電、汽車(chē)、航空航天、消費(fèi)、醫(yī)療、工業(yè)化自動(dòng)設(shè)備和儀器儀表等。
隨著行業(yè)朝著需要在更多應(yīng)用中使用 BLDC 電機(jī)的方向發(fā)展,許多工程師不得不將目光投向該技術(shù)。雖然電機(jī)設(shè)計(jì)的基礎(chǔ)要素仍然適用,但添加外部控制電路也增加了另一系列需考慮的設(shè)計(jì)事項(xiàng)。在諸多設(shè)計(jì)問(wèn)題中,最重要的一點(diǎn)是如何獲取電機(jī)換向的反饋。
電機(jī)換向
在深入探索 BLDC 電機(jī)反饋選項(xiàng)之前,先了解為什么需要它們至關(guān)重要。BLDC 電機(jī)可配置為單相、兩相和三相;其中最常用的配置為三相。相數(shù)與定子繞組數(shù)相匹配,而轉(zhuǎn)子磁極數(shù)根據(jù)應(yīng)用需求的不同可以是任意數(shù)量。
因?yàn)?BLDC 電機(jī)的轉(zhuǎn)子受旋轉(zhuǎn)的定子磁極影響,所以須追蹤定子磁極位置,以有效驅(qū)動(dòng)三個(gè)電機(jī)相。為此,需使用電機(jī)控制器在三個(gè)電機(jī)相上生成六步換向模式。這六步(或換向相)移動(dòng)電磁場(chǎng),進(jìn)而使轉(zhuǎn)子永磁體移動(dòng)電機(jī)軸。
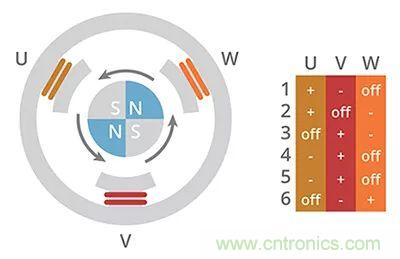
圖 1:BLDC 電機(jī)六步換向模式
通過(guò)采用這種標(biāo)準(zhǔn)電機(jī)換向序列,電機(jī)控制器即可利用高頻率脈寬調(diào)制 (PWM) 信號(hào),有效降低電機(jī)承受的平均電壓,從而改變電機(jī)速度。
除此之外,這種設(shè)置通過(guò)讓一個(gè)電壓源用于各種各樣的電機(jī),大大提升了設(shè)計(jì)靈活性,即使直流電壓源大大高出電機(jī)額定電壓的情況也不例外。為了讓此系統(tǒng)保持相對(duì)于有刷技術(shù)的效率優(yōu)勢(shì),在電機(jī)和控制器之間需要安裝非常嚴(yán)格的控制回路。
反饋技術(shù)的重要性就體現(xiàn)在這里;控制器要能保持對(duì)電機(jī)的精確控制,它必須始終掌握定子相對(duì)于轉(zhuǎn)子的確切位置。預(yù)期和實(shí)際位置出現(xiàn)任何非對(duì)準(zhǔn)或相移可能會(huì)導(dǎo)致意想不到的情況及性能下降。針對(duì) BLDC 電機(jī)換向可采用許多方式來(lái)實(shí)現(xiàn)這種反饋,不過(guò)最常見(jiàn)的方式是使用霍爾效應(yīng)傳感器、編碼器或旋轉(zhuǎn)變壓器。另外,某些應(yīng)用也會(huì)依靠無(wú)傳感器換向技術(shù)來(lái)實(shí)現(xiàn)反饋。
位置反饋
自無(wú)刷電機(jī)誕生以來(lái),霍爾效應(yīng)傳感器一直是實(shí)現(xiàn)換向反饋的主力。因三相控制僅需要三個(gè)傳感器且單位成本較低,所以單純從 BOM 成本角度來(lái)看,它們往往是實(shí)現(xiàn)換向最經(jīng)濟(jì)的選擇。
電機(jī)定子中嵌入了檢測(cè)轉(zhuǎn)子位置的霍爾效應(yīng)傳感器,這樣就可以切換三相電橋中的晶體管來(lái)驅(qū)動(dòng)電機(jī)。三個(gè)霍爾效應(yīng)傳感器輸出一般標(biāo)記為 U、V 和 W 通道。雖然霍爾效應(yīng)傳感器能夠有效解決 BLDC 電機(jī)換向問(wèn)題,但它們僅僅滿足了 BLDC 系統(tǒng)一半所需。
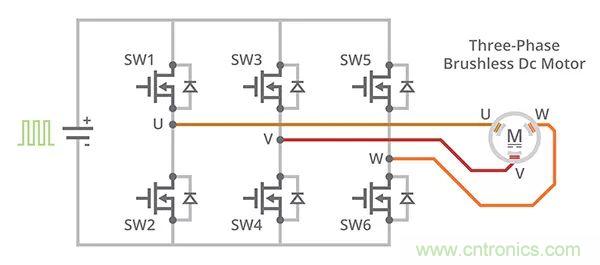
圖 2:三相橋式驅(qū)動(dòng)器電路
雖然霍爾效應(yīng)傳感器能使控制器驅(qū)動(dòng) BLDC 電機(jī),但遺憾的是,其控制僅限于速度和方向。在三相電機(jī)中,霍爾效應(yīng)傳感器只能在每個(gè)電循環(huán)內(nèi)供角度位置。
隨著磁極對(duì)數(shù)量的增加,每次機(jī)械轉(zhuǎn)動(dòng)的電循環(huán)數(shù)量也增加,而且隨著 BLDC 的使用變得更加普及,對(duì)精確位置傳感的需求也由此增加。為確保解決方案穩(wěn)健且完整,BLDC 系統(tǒng)應(yīng)提供實(shí)時(shí)位置信息,從而使得控制器不僅可以追蹤速度和方向,還可以追蹤行程距離和角度位置。
為滿足對(duì)更嚴(yán)格位置信息的需求,常用的解決方案是向 BLDC 電機(jī)添加增量式旋轉(zhuǎn)編碼器。通常,除霍爾效應(yīng)傳感器之外,還會(huì)在相同的控制反饋回路系統(tǒng)中添加增量編碼器。
其中霍爾效應(yīng)傳感器用于電機(jī)換向,而編碼器則用于更加精確地追蹤位置、旋轉(zhuǎn)、速度和方向。由于霍爾效應(yīng)傳感器僅在每個(gè)霍爾狀態(tài)變化時(shí)提供新的位置信息,所以其精度只達(dá)到每一電力循環(huán)六個(gè)狀態(tài);
而對(duì)雙極電機(jī)而言,僅為每一機(jī)械循環(huán)六個(gè)狀態(tài)。與能提供分辨率以數(shù)千 PPR(每轉(zhuǎn)脈沖數(shù))計(jì)的增量編碼器(可解碼為狀態(tài)變化次數(shù)的四倍)相比,兩者均需的必要性就顯而易見(jiàn)了。
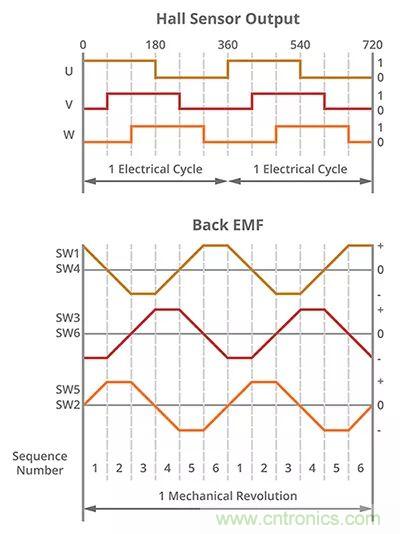
圖 3:六步霍爾效應(yīng)輸出和梯形電機(jī)相位
然而,由于電機(jī)制造商目前必須將霍爾效應(yīng)傳感器和增量編碼器都組裝到他們的電機(jī)上,所以許多編碼器制造商開(kāi)始提供具有換向輸出的增量編碼器,通常我們簡(jiǎn)稱(chēng)為換向編碼器。
這些編碼器經(jīng)過(guò)專(zhuān)門(mén)設(shè)計(jì),不僅可以提供傳統(tǒng)的正交 A 和 B 通道(以及某些情況下“每轉(zhuǎn)一次”的索引脈沖通道 Z),還可以提供大多數(shù) BLDC 電機(jī)驅(qū)動(dòng)器所需的標(biāo)準(zhǔn) U、V 和 W 換向信號(hào)。這樣一來(lái),電機(jī)設(shè)計(jì)師就可以省掉同時(shí)安裝霍爾效應(yīng)傳感器和增量編碼器的不必要步驟。
盡管該方法所具有的優(yōu)勢(shì)有目共睹,但此方法也做了很大的折衷。如上文所述,為使 BLDC 電機(jī)有效換向,必須掌握轉(zhuǎn)子和定子的位置。這意味著必須小心謹(jǐn)慎地確保換向編碼器的 U/V/W 通道與 BLDC 電機(jī)相位正確對(duì)準(zhǔn)。
對(duì)于光盤(pán)上具有固定圖案的光學(xué)編碼器以及必須手動(dòng)放置的霍爾效應(yīng)傳感器而言,實(shí)現(xiàn) BLDC 電機(jī)正確對(duì)準(zhǔn)的過(guò)程既反復(fù)、又耗時(shí)。對(duì)準(zhǔn)方法還需要額外的設(shè)備,包括第二個(gè)電機(jī)和一個(gè)示波器。要對(duì)準(zhǔn)一個(gè)光學(xué)編碼器或一組霍爾效應(yīng)傳感器,必須使用第二個(gè)電機(jī)來(lái)反向驅(qū)動(dòng) BLDC 電機(jī);
然后,當(dāng)電機(jī)在第二個(gè)電機(jī)的作用下勻速旋轉(zhuǎn)時(shí),使用示波器監(jiān)控三個(gè)電機(jī)相的反電動(dòng)勢(shì)(也稱(chēng)之為逆電動(dòng)勢(shì)或反電勢(shì))。編碼器或霍爾效應(yīng)傳感器隨后發(fā)出的 U/V/W 信號(hào)必須同示波器上的反電動(dòng)勢(shì)波形進(jìn)行對(duì)照檢查。
如果 U/V/W 通道和反電動(dòng)勢(shì)波形之間有任何差異,則必須進(jìn)行相位調(diào)整。這個(gè)過(guò)程中,每臺(tái)電機(jī)將耗費(fèi) 20 多分鐘的時(shí)間,并且需要大量的實(shí)驗(yàn)室設(shè)備進(jìn)行操作,因此是使用 BLDC 電機(jī)的主要煩惱來(lái)源。雖然光學(xué)換向編碼器通過(guò)僅安裝一項(xiàng)技術(shù)而解決了安裝負(fù)擔(dān),但光學(xué)換向編碼器的實(shí)施也具有缺乏多功能性的缺點(diǎn)。
因?yàn)楣鈱W(xué)編碼器使用其光盤(pán)中的固定圖案,所以購(gòu)買(mǎi)之前,電機(jī)磁極數(shù)、正交分辨率和電機(jī)軸的尺寸等都必須掌握清楚。
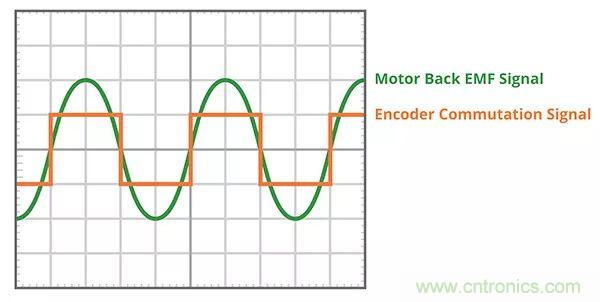
圖 4:換向通道和電機(jī)相位理想對(duì)準(zhǔn)
CUI Inc. 推出的增強(qiáng)型換向編碼器可同時(shí)解決這兩個(gè)問(wèn)題。該編碼器基于其 AMT 系列產(chǎn)品中采用的專(zhuān)利電容技術(shù)。光學(xué)編碼器采用非常小的 LED,它們發(fā)出的光線透過(guò)光盤(pán)(帶有特定間隔的槽口),從而生成輸出圖案。AMT 編碼器原理與之類(lèi)似,但不同之處在于 AMT 編碼器不是通過(guò) LED 傳輸光線,而是傳輸電場(chǎng)。
PCB 轉(zhuǎn)子將替換光盤(pán),該轉(zhuǎn)子包含調(diào)節(jié)電場(chǎng)的正弦曲線圖案。然后,調(diào)制信號(hào)的接收端回傳信號(hào)到發(fā)射器,此時(shí)通過(guò)專(zhuān)有 ASIC 將此信號(hào)與原始信號(hào)進(jìn)行比較。該技術(shù)與數(shù)字游標(biāo)卡尺原理相同,具有極佳的可靠性和精度。
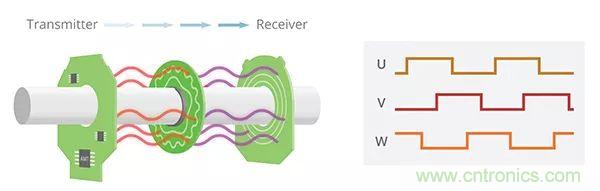
圖 5:電容式編碼器工作原理
AMT31 系列換向編碼器提供增量輸出 A/B/Z 和換向輸出 U/V/W。設(shè)計(jì)包含電容式 ASIC 和板載 MCU 后,編碼器就可以產(chǎn)生數(shù)字輸出。這種方式具有非常重要的作用,因?yàn)樗茉试S用戶(hù)按一下按鈕即可按數(shù)字形式設(shè)置編碼器的零位。
只需將 BLDC 電機(jī)鎖定到所需的相位狀態(tài),并使用 AMT One Touch Zero™ 模塊或 AMT Viewpoint™ 編程 GUI 調(diào)零 AMT31 編碼器。這樣一來(lái),就可以去掉反向驅(qū)動(dòng)電機(jī)或使用示波器查看輸出信號(hào)的步驟,同時(shí)組裝時(shí)間也可大幅減少 20 分鐘。
由于采用了電容技術(shù),因此正交分辨率和換向輸出可實(shí)現(xiàn)動(dòng)態(tài)調(diào)節(jié)。用戶(hù)只需連接 AMT31 編碼器與 AMT Viewpoint GUI,從 20 個(gè)正交分辨率(最大 4096 PPR)以及 7 個(gè)標(biāo)準(zhǔn)磁極對(duì)選項(xiàng)(最多 20 個(gè)磁極)列表中進(jìn)行選擇,然后點(diǎn)擊“Program”(編程)即可。
這為開(kāi)發(fā)過(guò)程帶來(lái)了優(yōu)勢(shì),工程師能夠快速、輕松地更改原型樣機(jī),并且還能對(duì)不同分辨率和 BLDC 磁極數(shù)的多種電機(jī)控制使用單個(gè)庫(kù)存單位 (SKU),以提升生產(chǎn)供應(yīng)鏈管理效率。
除了每個(gè)裝置支持多個(gè)分辨率和磁極對(duì)數(shù)外,編碼器外殼還易于組裝,同時(shí)可提供多種安裝以及多個(gè)套管尺寸選擇,以便適應(yīng)常用的電機(jī)軸直徑。
另外,AMT Viewpoint GUI 還為 AMT31 系列編碼器帶來(lái)前所未有的設(shè)計(jì)支持。連接到 AMT Viewpoint 時(shí),可以從 AMT31 編碼器下載診斷數(shù)據(jù)并用于避免現(xiàn)場(chǎng)潛在故障以及減少停機(jī)時(shí)間。
總結(jié)
高精度的嚴(yán)格控制回路能讓 BLDC 電機(jī)在許多領(lǐng)域發(fā)揮出色的優(yōu)勢(shì)。精度增加意味著功率損耗更少、精確度更高,以及能讓終端用戶(hù)更好地控制 BLDC 操作。
當(dāng)前,BLDC 電機(jī)廣泛已應(yīng)用于多種多樣的領(lǐng)域中,包括外科手術(shù)機(jī)械臂、無(wú)人駕駛汽車(chē)、裝配線自動(dòng)化等,并且很快將在還未設(shè)想的許多其它領(lǐng)域中獲得一席之地。
BLDC 電機(jī)市場(chǎng)在不斷增長(zhǎng),對(duì) BLDC 電機(jī)的要求卻始終未變:市場(chǎng)需要低成本、高精度位置傳感反饋的高效耐用電機(jī)。 當(dāng)與 BLDC 電機(jī)配合使用時(shí),AMT31 系列編碼器能夠在安裝過(guò)程中節(jié)省寶貴的時(shí)間,同時(shí)簡(jiǎn)化開(kāi)發(fā)和制造流程。
憑借其通用性、幾秒之內(nèi)完成編程和調(diào)零設(shè)置的能力,以及與 AMT Viewpoint GUI 的兼容性,AMT31 編碼器很好地切合了快速增長(zhǎng)的 BLDC 市場(chǎng)的需求。
推薦閱讀:
