
【導讀】本文介紹工業(yè)自動化領域的設計人員在設計用于電機控制的位置檢測接口時面臨的常見問題,即:能在速度更快、尺寸更小的應用中檢測位置。利用從編碼器捕獲的信息以便精確測量電機位置對于自動化和機器設備的成功運行很重要。快速、高分辨率、雙通道同步采樣模數(shù)轉換器(ADC)是此系統(tǒng)的重要組件。
簡介
位置、速度和方向之類的電機旋轉信息必須準確,以為各種新興應用生產精準的驅動器和控制器,例如,將微型組件裝配到空間有限的PCB區(qū)域中的裝配機器。近來,電機控制開始走向微型化,使得醫(yī)療健康行業(yè)出現(xiàn)新的外科手術機器人應用,航空航天和防務領域出現(xiàn)新無人機應用。體積更小的電機控制器還導致工業(yè)和商業(yè)裝配領域涌現(xiàn)新的應用。對設計人員而言,挑戰(zhàn)在于:滿足高速應用中的位置反饋傳感器的高精度要求,同時將所有組件集成到有限的PCB區(qū)域內,以安裝到微型封裝內部,例如機械手臂。
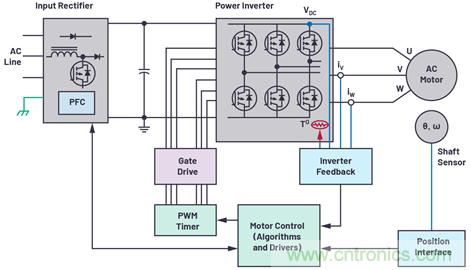
圖1.閉環(huán)電機控制反饋系統(tǒng)。
電機控制
電機控制環(huán)路(如圖1所示)主要由電機、控制器和位置反饋接口組成。電機轉動旋轉軸,帶動機械手臂跟著移動。電機控制器管控電機何時施加力道、何時停止,或者繼續(xù)轉動。環(huán)路中的位置接口向控制器提供轉速和位置信息。對于裝配微型表貼PCB的裝配機器來說,這些數(shù)據(jù)是其正常運行的關鍵。所有這些應用都需要獲取關于旋轉對象的準確位置測量信息。
位置傳感器的分辨率必須非常高,足以準確檢測電機軸的位置,拿取對應的微型組件,并將組件放置到板上的對應位置。此外,電機轉速越高,所需的環(huán)路帶寬越高,延遲越低。
位置反饋系統(tǒng)
在低端應用中,使用增量傳感器和比較器可能就能夠實施位置檢測,但在高端應用中,則需要更加復雜的信號鏈。這些反饋系統(tǒng)包含位置傳感器,之后是模擬前端信號調理、ADC,以及ADC驅動器,數(shù)據(jù)先經過它們,之后再進入數(shù)字域。其中最精確的位置傳感器就是光學編碼器。光學編碼器由LED光源、連接到電機軸的標記圓盤和光電探測器組成。圓盤包含不透明和透明的掩碼區(qū)域,可以阻隔光線或讓光線通過。光電探測器檢測這些光線,開/關光信號則轉換為電子信號。
隨著圓盤轉動,光電探測器(與圓盤的模式配合)生成小的正弦和余弦信號(mV或µV等級)。這種系統(tǒng)是絕對位置光學編碼器采用的典型系統(tǒng)。這些信號進入模擬信號調理電路(一般由分立式放大器或模擬PGA組成,用于獲取高達1 V峰峰值范圍的信號),通常是為了讓ADC輸入電壓范圍匹配最大動態(tài)范圍。每個放大的正弦和余弦信號之后都被同步采樣ADC的驅動放大器捕捉。
ADC的每個通道都必須支持同步采樣,以便同時獲取正弦和余弦數(shù)據(jù)點,由這些數(shù)據(jù)點組合提供軸的位置信息。ADC轉換結果會發(fā)送給ASIC或微控制器。電機控制器在每個PWM周期中查詢編碼器位置,然后根據(jù)接收的指令使用該數(shù)據(jù)來驅動電機。過去,為了集成到有限的板空間中,系統(tǒng)設計人員必須犧牲ADC速度或通道數(shù)。
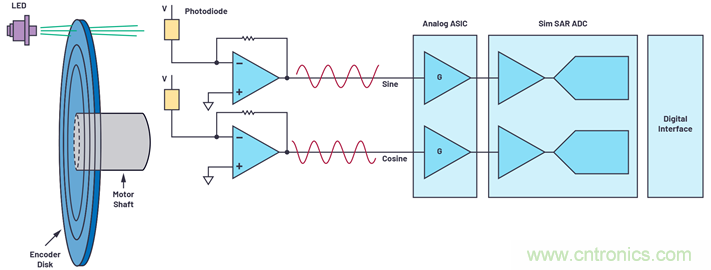
圖2.位置反饋系統(tǒng)。
優(yōu)化位置反饋
隨著技術不斷發(fā)展,導致需要實施高精度位置檢測的電機控制應用不斷創(chuàng)新。光學編碼器的分辨率可能由圓盤上精細光刻的槽數(shù)決定,通常有幾百或幾千個。將這些正弦和余弦信號插入到高速、高性能ADC中之后,無需對編碼器圓盤實施系統(tǒng)變更,即可創(chuàng)建出分辨率更高的編碼器。例如,以更低的速率對編碼器的正弦和余弦信號采樣時,只會捕捉到少數(shù)信號值,具體如圖3所示;這會限制位置電容的精度。在圖3中,當ADC以更快速率采樣時,可以獲取更詳細的信號值,從而更精準地確定位置。ADC的高速采樣速率支持過采樣,進一步改善噪聲性能,消除了一些數(shù)字后處理需求。與此同時,可以降低ADC的輸出數(shù)據(jù)速率;也就是說,支持較慢的串行頻率信號,因此簡化了數(shù)字接口。電機位置反饋系統(tǒng)安裝在電機總成上,在某些應用中,總成可能非常小巧。所以,能否裝入編碼器模塊面積有限的PCB區(qū)域中,尺寸大小是關鍵。在單個微型封裝中集成多個通道組件非常有利于節(jié)省空間。
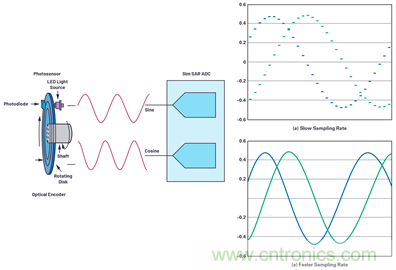
圖3.采樣速率。
光學編碼器位置反饋設計示例
圖4所示為適合光學編碼器位置反饋系統(tǒng)的優(yōu)化解決方案示例。此電路很容易和絕對類型的光學編碼器連接,然后電路很容易捕捉來自編碼器的差分正弦和余弦信號。ADA4940-2前端放大器屬于雙通道、低噪聲全差分放大器,用于驅動AD7380,后者屬于雙通道、16位全差分4 MSPS同步采樣SAR ADC,采用3 mm × 3 mm小型LFCSP封裝。片內2.5 V基準電壓源允許此電路采用最少數(shù)量的組件。ADC的VCC和VDRIVE,以及放大器驅動器的電源軌道可由LDO穩(wěn)壓器供電,例如LT3023 和LT3032。當這些參考設計相互連接時(例如,使用一個1024槽光學編碼器,在一個編碼器圓盤周期中生成1024個正弦和余弦周期),16位AD7380在216個代碼的各編碼器槽中采樣,將編碼器的整體分辨率提高到26位。4 MSPS吞吐速率確保捕捉到正弦和余弦周期的詳細信息,以及最新的編碼器位置信息。高吞吐速率支持實施片內過采樣,從而縮短數(shù)字ASIC或微控制器將精確的編碼器位置反饋給電機時的時間延遲。AD7380片內過采樣的另一個好處是:可以額外增加2位分辨率,可以和片內分辨率增強功能配合使用。分辨率增強功能可以進一步提升精度,最高可以達到28位。應用筆記AN-2003詳細介紹了AD7380的這個過采樣和分辨率增強功能。
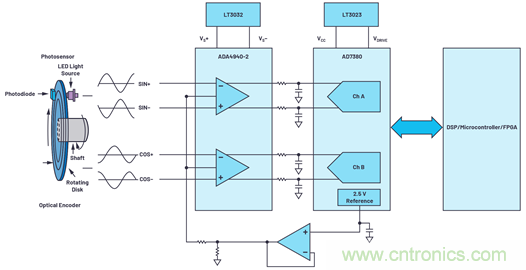
圖4.經過優(yōu)化的反饋系統(tǒng)設計。
結論
電機控制系統(tǒng)需要更高的精度、更高的速度,以及更高程度的微型化。光學編碼器被用作電機位置檢測器件。所以,在測量電機位置時,光學編碼器信號鏈必須具備高精度。高速度、高吞吐速率ADC準確捕捉信息,然后將電機位置數(shù)據(jù)發(fā)送給控制器。AD7380的速度、密度和性能可以滿足行業(yè)要求,同時在位置反饋系統(tǒng)中實現(xiàn)更高的精度,并對系統(tǒng)實施優(yōu)化。
推薦閱讀:

