
【導(dǎo)讀】在 Voyage 上我們分享了關(guān)于 Homer 的新消息,即第一個(gè)自動(dòng)駕駛出租車。Homer 配備了一系列的傳感器,來理解世界并進(jìn)行導(dǎo)航,其中的關(guān)鍵設(shè)備是 LIDAR (light detection and ranging 的縮寫)。在這篇博文中,你將會(huì)學(xué)習(xí)到更多關(guān)于 LIDAR 的知識(shí),包括它在自動(dòng)駕駛汽車空間中的起源,以及它是如何從眾多傳感器中脫穎而出的。請(qǐng)盡情享受這篇文章!
“超能力”LIDAR 具備讓自動(dòng)駕駛汽車(或是任何機(jī)器人)觀察這個(gè)世界的幾個(gè)特殊的“超能力” :
360 °全方位無死角的可視能力——想象一下人眼能夠時(shí)時(shí)刻刻觀察到所有的方向
極其準(zhǔn)確的深度信息——想象一下你總是可以知道與物體的精確距離(精度± 2 cm )
如果你之前見過自動(dòng)駕駛汽車,可能你已經(jīng)接觸過 LIDAR。正如下圖中的 Uber 和 Baidu 的自動(dòng)駕駛汽車,它是安裝在汽車頂部的不斷旋轉(zhuǎn)的笨重盒子。

目前市場(chǎng)上最受歡迎的 LIDAR 傳感器是下圖中 Homer 頂部的高功率Velodyne HDL-64E。

LIDAR 的工作原理傳感器是如何做到 360 度無死角以及高精度的深度信息捕獲呢?
簡(jiǎn)單地說:LIDAR 傳感器不斷發(fā)射激光傳感束,然后根據(jù)光束返回至傳感器的時(shí)間測(cè)距。
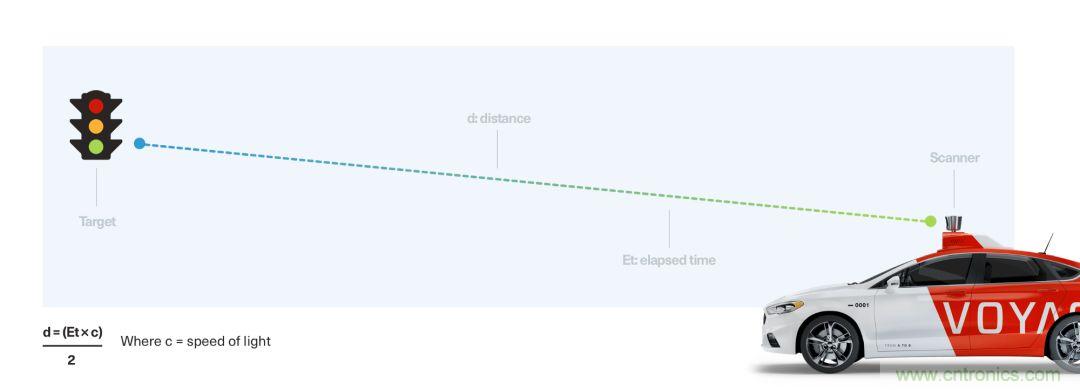
通過每秒發(fā)送數(shù)百萬光束,LIDAR 傳感器可以真正地實(shí)現(xiàn) 3D 世界的 可視化??梢酝茢喑雠c周圍任何物體的精確測(cè)量值(最大約 60 米,取決于所用的傳感器)
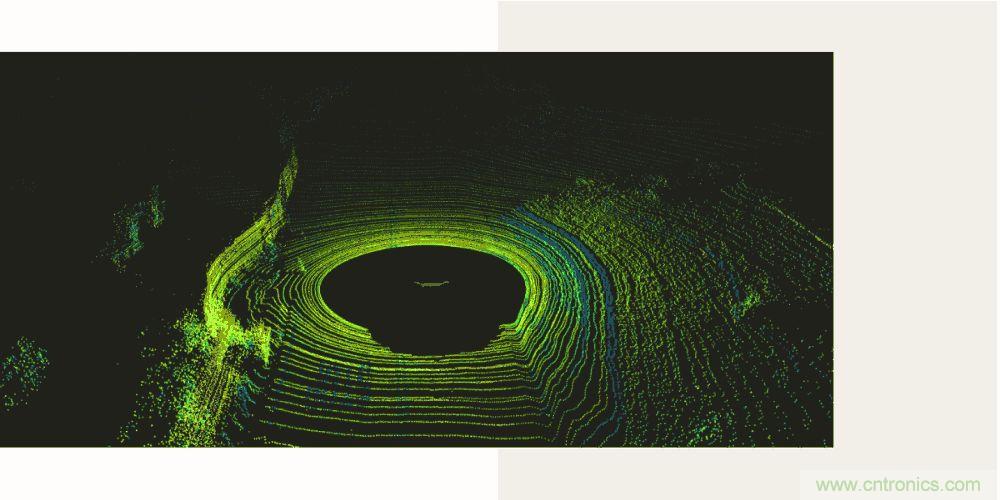
Homer 的駕駛空間
LIDAR 的簡(jiǎn)史為了進(jìn)一步理解現(xiàn)代 LIDAR 背后的技術(shù)支持,著眼于具備相同目標(biāo)的相似技術(shù)非常重要。
Sonar
最初的深度感應(yīng)祖先是蝙蝠(具備 5000 萬年的歷史)。蝙蝠(或是海豚,之類……)能夠像 LIDAR 一樣使用回聲定位,另一個(gè)稱為聲吶(聲音導(dǎo)航和測(cè)距)。和 LIDAR 激光測(cè)距不同的是,Sonar 使用聲波進(jìn)行測(cè)距。
經(jīng)過了 5000 萬年的生物進(jìn)化,隨著潛艇戰(zhàn)的到來,第一次世界大戰(zhàn)加速了人造聲吶傳感器的大規(guī)模部署。Sonar 在水中工作的效果非常突出,因?yàn)槁暡ㄔ谒斜裙夂蜔o線電波的傳播速度更快(指的是每秒的傳播距離)。Sonar 傳感器在現(xiàn)代汽車上的應(yīng)用頻率很高,主要是以停車傳感器的形式。短距離傳感器(——5m)提供了低廉的方式來告知后方墻壁與汽車的距離。聲吶還未被證明可以在自動(dòng)駕駛汽車要求的范圍內(nèi)工作(60 m+)
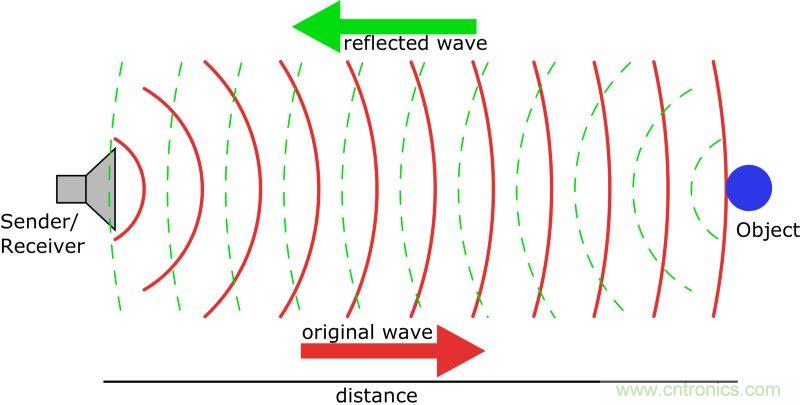
在這種情況下,蝙蝠是回聲定位信號(hào)的發(fā)送者和接受者。
雷達(dá)
雷達(dá)(無線電導(dǎo)航與測(cè)距),與 Sonar 非常相像,是在第二次世界大戰(zhàn)時(shí)發(fā)展起來的另一項(xiàng)技術(shù)。與使用激光或聲波不同的是,它利用無線電波來測(cè)距。在 Homer 上使用 Delphi 傳感器利用大量的雷達(dá),它是一種久經(jīng)考驗(yàn)的方法,能夠精確地檢測(cè)和跟蹤最遠(yuǎn)距離 200 米的物體。
從缺點(diǎn)這方面來看,雷達(dá)的缺點(diǎn)非常少。它在極端天氣下的表現(xiàn)優(yōu)異并且價(jià)位非常實(shí)惠。雷達(dá)不僅在物體檢測(cè)方面應(yīng)用廣泛,并且在追蹤方面也有很多的應(yīng)用(即:理解車輛行駛的速度以及方向)。雷達(dá)不一定能提供 LIDAR 的粒度,但是雷達(dá)是免費(fèi)的,LIDAR 不是。

在 Homer 上安裝的雷達(dá)
激光雷達(dá)技術(shù)
激光雷達(dá)技術(shù)誕生于20世紀(jì)60年代,就在激光問世不久。在1971年阿波羅15號(hào)任務(wù)期間,宇航員就用它測(cè)量繪制了月球表面,讓人們第一次看到激光雷達(dá)能做什么。
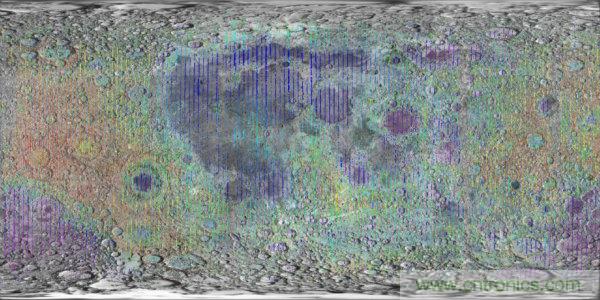
克萊門汀
在激光雷達(dá)應(yīng)用于汽車和自動(dòng)駕駛使用之前,激光雷達(dá)通常應(yīng)用于考古學(xué)。并且激光雷達(dá)在繪制地面版圖中有著極大的幫助,在考古學(xué)和農(nóng)業(yè)中占有著及其重要的地位。
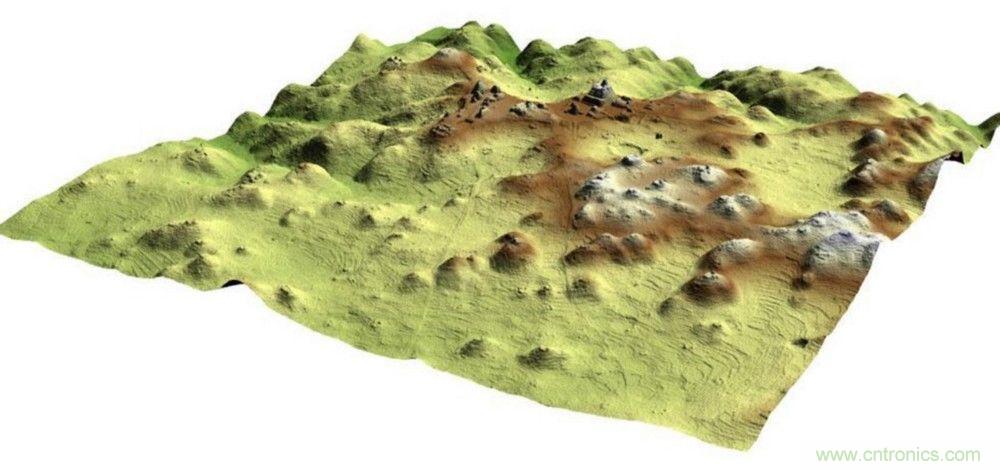
一種空中捕獲的激光雷達(dá)地圖
“當(dāng)激光雷達(dá)技術(shù)首次應(yīng)用于Angamuco時(shí),我們從觀測(cè)到的區(qū)域大小,建筑物和結(jié)構(gòu)來看,甚至無法得出這是個(gè)城市的結(jié)論。團(tuán)隊(duì)成員史蒂夫萊斯教授告訴(英國(guó)廣播公司)BBC。更令人驚訝的是,盡管城市面目全非,但是還是有球隊(duì)利用它在這里找到了一個(gè)名為pok-ta-pok的中美洲比賽球場(chǎng),在比賽中費(fèi)希爾還在離球門十米遠(yuǎn)的地方進(jìn)過球“這真是太令人驚訝了”萊斯說。 -激光雷達(dá)幫助考古學(xué)能探索到更多不為人知的地方。
激光雷達(dá)技術(shù)的50個(gè)應(yīng)用同時(shí)激光雷達(dá)技術(shù)在許多不同的領(lǐng)域中正在變得越來越流行。
直到21世紀(jì)初,激光雷達(dá)技術(shù)才首次被用于汽車,并且在2005年,斯坦利(以及后來的Junior)在Grand DARPA挑戰(zhàn)賽中應(yīng)用了才使它流行起來。

在這場(chǎng)比賽中左圖的斯坦利使用的是SICK的激光雷達(dá)傳感器,而右圖的Junior則使用的是Velodyne的傳感器。
斯坦利是2005年Grand DARPA挑戰(zhàn)賽的冠軍,除了裝備了軍用級(jí)GPS,陀螺儀,加速度計(jì)和一個(gè)可見度80米以上的攝像頭外,還另外在屋頂安裝了5個(gè)SICK激光雷達(dá)傳感器。所有這些都是由6個(gè)放置于后備箱的1.6GHz 的奔騰lunix系統(tǒng)電腦所驅(qū)動(dòng)的。
這項(xiàng)使用SICK激光雷達(dá)技術(shù)(在2005年為很大一部分的挑戰(zhàn)車輛提供動(dòng)力)由于每次激光掃描基本上都是由單個(gè)平面進(jìn)行的切割,因此對(duì)于每位參賽者必須有序的指揮他們。許多參賽隊(duì)伍將它們安裝在傾斜臺(tái)上,這樣他們就可以順利的“掃過”一段空間。簡(jiǎn)單來說:與我們今天所知的現(xiàn)代3D 激光雷達(dá)技術(shù)(多方向的光束)相比,SICK是一個(gè)2D激光雷達(dá)(單一方向上的一些光束)。

Velodyne長(zhǎng)期以來一直是激光雷達(dá)的市場(chǎng)領(lǐng)導(dǎo)者,但是他們并不滿足于現(xiàn)狀。Velodyne于1983年開始從事音頻公司的生活,超低音揚(yáng)聲器裝備特定的傳感器,利用DSP和定制DSP控制算法。以實(shí)現(xiàn)低頻音效和低音炮音效技術(shù)。在斯坦利首次登場(chǎng)的同時(shí),Velodyne同時(shí)成為我們今天所知的激光雷達(dá)公司。Velodyne的創(chuàng)始人大衛(wèi)和布魯斯霍爾首次參加了2004年DARPA比賽,組建了DAD(數(shù)字音頻驅(qū)動(dòng)器)團(tuán)隊(duì)。2005年第二場(chǎng)比賽中,大衛(wèi)霍爾發(fā)明了基于3D激光的實(shí)時(shí)系統(tǒng)并申請(qǐng)了專利,這為Velodyne當(dāng)前的激光雷達(dá)產(chǎn)品奠定了基礎(chǔ)。在2007年第三次DARPA挑戰(zhàn)中,大多數(shù)團(tuán)隊(duì)的感知系統(tǒng)使用的就是這項(xiàng)技術(shù)。大衛(wèi)·霍爾的發(fā)明現(xiàn)在在史密森學(xué)會(huì)中被認(rèn)為是實(shí)現(xiàn)自動(dòng)駕駛的根本性突破。

2005年的DAD隊(duì)
2005年時(shí)DAD隊(duì)第一臺(tái)Velodyne激光雷達(dá)掃描儀的直徑約為30英寸,重量接近100磅。因此他們團(tuán)隊(duì)選擇將激光雷達(dá)掃描儀商業(yè)化而不是繼續(xù)使用它參加比賽。
Velodyne公司不斷改善技術(shù),將傳感器的尺寸和重量減輕的同時(shí)提高它的性能。Velodyne的HDL-64E 激光雷達(dá)傳感器是2007年所有頂級(jí)DARPA城市挑戰(zhàn)賽團(tuán)隊(duì)的地形圖構(gòu)建和障礙物檢測(cè)的主要手段,六個(gè)完成這個(gè)挑戰(zhàn)賽的團(tuán)隊(duì)有五個(gè)在使用該傳感器,其中包括獲勝和第二個(gè)團(tuán)隊(duì)。一些團(tuán)隊(duì)完全依靠激光雷達(dá)獲取用于通過模擬城市環(huán)境駕駛自動(dòng)駕駛車輛的環(huán)境的信息。-維基百科
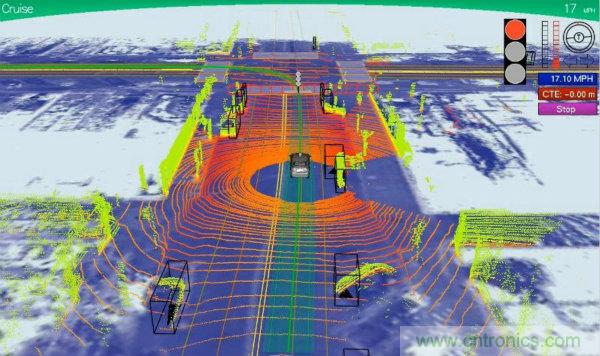
LIDAR(激光雷達(dá)技術(shù))在自動(dòng)駕駛汽車中的作用為什么 LIDAR 會(huì)使用自動(dòng)駕駛汽車成為可能?簡(jiǎn)而言之:繪制地圖。LIDAR可以生成巨大的3D地圖(這是它最早的應(yīng)用?。┠憧梢杂靡云嚮驒C(jī)器人的導(dǎo)航。通過使用LIDAR來對(duì)周圍的環(huán)境進(jìn)行繪測(cè)和導(dǎo)航,你可以提前知道一條車道的輪廓、停止標(biāo)志甚至是前面500米的紅綠燈。這種可預(yù)測(cè)性正是實(shí)現(xiàn)自動(dòng)駕駛汽車這樣的技術(shù)所需要的,并且是過去5年來取得進(jìn)步的重要原因。
物體識(shí)別
隨著LIDAR應(yīng)用的更加廣泛并且擁有更高的分辨物體的能力,在物體識(shí)別和追蹤中出現(xiàn)了一個(gè)新實(shí)例。LIDAR繪制的地圖不僅可以讓您準(zhǔn)確了解自己在世界的哪個(gè)位置進(jìn)而幫助您進(jìn)行導(dǎo)航。還可以識(shí)別和跟蹤汽車,行人等障礙物,比如說Waymo的橄欖球頭盔。
現(xiàn)代LIDAR使你可以識(shí)別一個(gè)騎自行車的人和一個(gè)行走的人,甚至可以測(cè)量他們改變方向和行進(jìn)的速度。
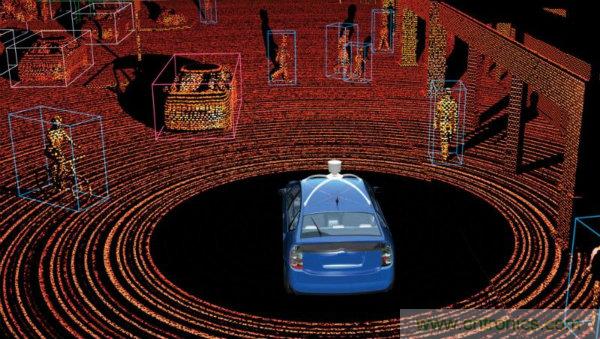
一輛谷歌汽車
令人驚嘆的導(dǎo)航,不可思議的可預(yù)測(cè)性、高度解析物體的跟蹤相結(jié)合意味著LIDAR是主導(dǎo)當(dāng)代自動(dòng)駕駛汽車的關(guān)鍵,而且很難看出這種主導(dǎo)會(huì)生變化。除非…
視覺傳感器主導(dǎo)的自動(dòng)駕駛汽車
那里有很多創(chuàng)業(yè)公司并沒有使用激光雷達(dá)傳感器,僅使用視覺傳感器(也許是雷達(dá))來解決自動(dòng)駕駛汽車的問題。特斯拉是其中最有影響力的公司,他們的CEO埃隆馬斯克提出這樣的想法:如果人類能夠只用眼睛,耳朵和大腦來感知和導(dǎo)航這個(gè)世界,那為什么不能用在自動(dòng)駕駛汽車上呢?我確信這種方法將取得驚人的成果,尤其是現(xiàn)在已經(jīng)有許多優(yōu)秀的團(tuán)隊(duì)正在努力實(shí)現(xiàn)這一目標(biāo),其中有Comma和AutoX。
特斯拉表示他們已經(jīng)決定規(guī)?;a(chǎn)。 未來特斯拉希望很快能夠每年生產(chǎn)50萬輛汽車,并且他們已不再需要等待激光雷達(dá)的降價(jià) 。
埃隆馬斯克說,谷歌在其自動(dòng)駕駛汽車中使用的激光雷達(dá)''''''''在汽車中沒有意義……
幾天前,特斯拉CEO埃隆馬斯克召開新聞發(fā)布會(huì),介紹了自動(dòng)駕駛功能…
LIDAR的未來業(yè)界的進(jìn)步聚焦于降成本和分辨率、范圍的提升。
降低成本
固態(tài)LIDAR有望提供1000美元以下的LIDAR單元,相比于當(dāng)下的80000美元單價(jià)的LIDAR極具吸引力。LeddarTech是這個(gè)早期市場(chǎng)的領(lǐng)軍公司之一。
Velodyne對(duì)于固態(tài)LIDAR看法如下:
固態(tài)且固定傳感器是出于更小的尺寸和盡可能低的成本的可嵌入的傳感器而考慮的。這也就意味著視域也就更小。Velodyne支持固定的和旋轉(zhuǎn)的傳感器。固定的傳感器為了能夠嵌入所以需要小型化。從成本的角度考慮,兩者都包含鏡頭,激光和檢測(cè)裝置。最低成本得系統(tǒng)實(shí)際上是通過旋轉(zhuǎn)視域來復(fù)用鏡頭、激光和檢測(cè)裝置,而不是使用額外單獨(dú)包含鏡頭、激光和檢測(cè)裝置的傳感器。復(fù)用不僅更加經(jīng)濟(jì)實(shí)惠而且更加實(shí)用,因?yàn)檫@樣能夠減小因?yàn)閷?shí)時(shí)融合不同視角數(shù)據(jù)而帶來的誤差,這在車輛實(shí)時(shí)運(yùn)動(dòng)時(shí)相當(dāng)關(guān)鍵。
精度與范圍提升
LIDAR應(yīng)用場(chǎng)景的猛增吸引了一大票才華橫溢的創(chuàng)始人和團(tuán)隊(duì)投入其中。更高的分辨率與更遠(yuǎn)的探測(cè)范圍(例如200米)將提升物體探測(cè)和跟蹤的性能,并且是像Lumina這樣的初創(chuàng)公司的傳感器產(chǎn)品的關(guān)鍵區(qū)別之一。
推薦閱讀:

