
【導(dǎo)讀】我們將研究CCM反激式轉(zhuǎn)換器于電壓模式下被漏電感影響的小信號(hào)響應(yīng)。我們將從大信號(hào)模型逐步邁向逐漸簡(jiǎn)化的小信號(hào)電路原理圖,以建立最簡(jiǎn)單的線性版本。從這最終的電路,我們將提取控制-輸出傳遞函數(shù),并顯示漏電感如何影響傳遞函數(shù)分母的品質(zhì)因數(shù)。
從大信號(hào)到小信號(hào)
當(dāng)您想獲得一個(gè)復(fù)雜電路的傳遞函數(shù)時(shí),您的目標(biāo)是減少?gòu)?fù)雜度,以便通過(guò)最簡(jiǎn)單的電路原理圖進(jìn)行分析。但是,當(dāng)您在減少電路的過(guò)程中–通過(guò)因式分解、簡(jiǎn)化表達(dá)式、忽略變量等–您必須測(cè)試您的新電路,并與最初的電路響應(yīng)進(jìn)行比較。在最初的響應(yīng)和您隨后的簡(jiǎn)化版本的響應(yīng)之間的任何偏差都表明您弄錯(cuò)了,或者您作的假設(shè)過(guò)于簡(jiǎn)單化 :丟棄這電路并回到前一步重做。遵照這步驟,您肯定進(jìn)展很慢,但卻很仔細(xì),您可立即發(fā)現(xiàn)和改正錯(cuò)誤。沒(méi)有什么比在結(jié)束時(shí)發(fā)現(xiàn)錯(cuò)誤而同時(shí)您意識(shí)到在一個(gè)中間步驟就出了問(wèn)題更令人沮喪的了!
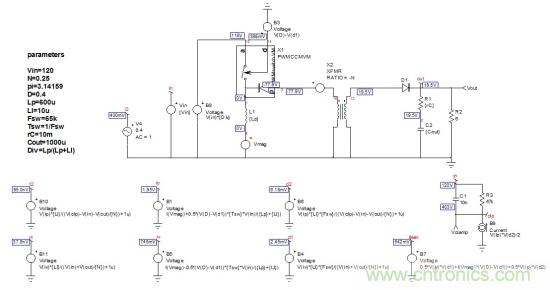
圖1:這開(kāi)環(huán)大信號(hào)電路原理圖是我們的起始電路,其動(dòng)態(tài)響應(yīng)將用作后面步驟的參考
首先我們用第二部分介紹的小信號(hào)版本代替大信號(hào)PWM開(kāi)關(guān)模型。然后,我們可運(yùn)行一個(gè)交流仿真,并驗(yàn)證操作點(diǎn)和響應(yīng)是相同的。非線性模型在圖1中,而小信號(hào)版本出現(xiàn)在圖2中。占空比已分為兩個(gè)源,一個(gè)用于靜態(tài)占空比,一個(gè)用于交流調(diào)制。
偏置點(diǎn)與圖1中的相同說(shuō)明第一步是正確的。我們來(lái)看看這兩個(gè)比較電路的頻率響應(yīng)如何。我們已采集了如圖3 的波特圖:幅值和相位曲線重疊,驗(yàn)證了我們的第一步。
圖2中的電路圖是正確的但相當(dāng)復(fù)雜。如上所述,小信號(hào)分析意味著盡可能簡(jiǎn)化電路,并將各種不同元件重新整理成一個(gè)更有意義的架構(gòu)。
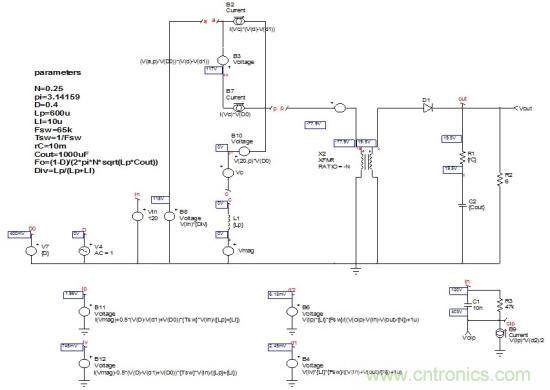
圖2:PWM開(kāi)關(guān)由小信號(hào)版本替代,并對(duì)參考頻率響應(yīng)進(jìn)行了電路動(dòng)態(tài)響應(yīng)檢查
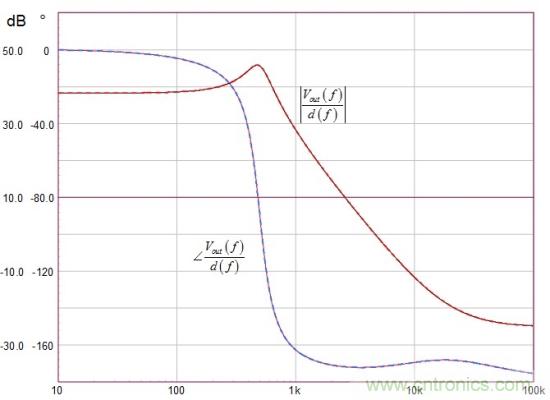
圖3:兩個(gè)電路的波特圖完全重疊,驗(yàn)證了第一步。
我們插入的PWM開(kāi)關(guān)模型確實(shí)是線性版本,我們無(wú)需研究它。然而,計(jì)算峰谷電流、鉗位電壓等的所有源仍然是大信號(hào)運(yùn)算,我們需要將其線性化。幸運(yùn)的是,這有些源在我們的交流分析中是不需要的的如Ip和d2。
源線性化
您有兩個(gè)選擇,如果您想線性化這些源。您可通過(guò)小的勵(lì)磁改變每一變量–您看到的某些變量中的小帽子^ - 并整理交流和直流項(xiàng)以形成兩個(gè)獨(dú)立的等式:一個(gè)靜態(tài)和一個(gè)動(dòng)態(tài)的表達(dá)式。靜態(tài)的表達(dá)式描述了操作點(diǎn)–此處我們并不需要它–而動(dòng)態(tài)的表達(dá)式是我們想要的。采用這技術(shù)的問(wèn)題是您獲得的項(xiàng)和交叉產(chǎn)品的數(shù)量,特別是變量超過(guò)兩個(gè)。整理這些項(xiàng)以形成交流和直流等式,有時(shí)可能是繁瑣的和錯(cuò)誤的源。我們?cè)囍捎霉鹊纂娏鞯亩x:
 (1)
(1)這里有3個(gè)變量,Ic, d 和d1。如果我們少量改變每一變量,得出
 (2)
(2)展開(kāi)為
 (3)
(3)現(xiàn)在合并交流和直流項(xiàng),我們有兩個(gè)定義:
 (4)
(4)如果我們定義兩個(gè)系數(shù)kivd 和kivd1為
 (5)
(5) (6)
(6)(4)中的動(dòng)態(tài)等式可重新整理為
 (7)
(7)靜態(tài)系數(shù)kivd 和kivd1將被作為參數(shù)在捕獲的電路圖中傳遞,并在仿真開(kāi)始前預(yù)估。
另一現(xiàn)有的選擇是不用整理而以更快的方式獲得小信號(hào)系數(shù)如kivd 和kivd1。分步操作是簡(jiǎn)單的,但表達(dá)式很復(fù)雜,并有多個(gè)變量,它很快成為困難的工作,您無(wú)法通過(guò)解算器如Mathcad?自動(dòng)求解。一組不相關(guān)(獨(dú)立) 的變量給出更快的方法,包括使用偏微分法,如下所示:
 (8)
(8)或使用小信號(hào)記法
 (9)
(9)在這里,交流項(xiàng)系數(shù)只有從這偏微分法獲得。將該方法應(yīng)用到圖2中的d1發(fā)生器得出
 (10)
(10)從中導(dǎo)出
 (11)
(11)考慮kd1vo 和kd1iv系數(shù),我們可將(11)改寫(xiě)為
 (12)
(12)其中
 (13)
(13) (14)
(14)現(xiàn)在我們有線性的d1 和Iv源,我們可更新和簡(jiǎn)化電路圖圖2。結(jié)果如圖4:在參數(shù)文本窗口中計(jì)算表達(dá)式(5)、(6)和(13)、(14)?,F(xiàn)在這圖中的所有源都是小信號(hào)類型??焖俚慕涣鞣治鲲@示,頻率響應(yīng)的幅值和相位完全與圖3匹配。
簡(jiǎn)化電路原理圖
我們可從這電路原理圖開(kāi)始分析線性轉(zhuǎn)換器。不過(guò)可能需要進(jìn)一步的簡(jiǎn)化和整理。例如,在控制-輸出傳遞函數(shù)中,輸入電壓是Vin恒定的,
因此,連接到輸入電壓的節(jié)點(diǎn)“a”正好接地。通過(guò)接地節(jié)點(diǎn)“a”,您可重畫(huà)電路并顯示為如圖5所示的更簡(jiǎn)單的版本。測(cè)試這電路的頻率響應(yīng)并與圖3比較,以檢測(cè)在新整理出的模型中的任何錯(cuò)誤。
電流源B7與電壓源B1串聯(lián)。為進(jìn)一步簡(jiǎn)化,B7負(fù)端可參考接地,而B(niǎo)1的輸出連接到節(jié)點(diǎn)20以獨(dú)立的源轉(zhuǎn)換。圖6給出了新的電路圖。節(jié)點(diǎn)20用于源B10(通過(guò)定義更新),兩個(gè)電流源B7/B2可并聯(lián)以形成單個(gè)源。這是如圖7所示的用于分析的最終電路。請(qǐng)注意源Iv表達(dá)式已包含在d1源中?;趫D8中的大信號(hào)參考模型繪制此電路的頻率響應(yīng)。因?yàn)橄辔缓头迪嗤?,我們現(xiàn)在可著手這最終的表達(dá)式。
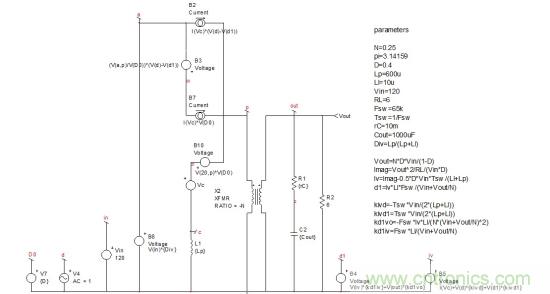
圖4:更新的電路現(xiàn)在只包括線性源。
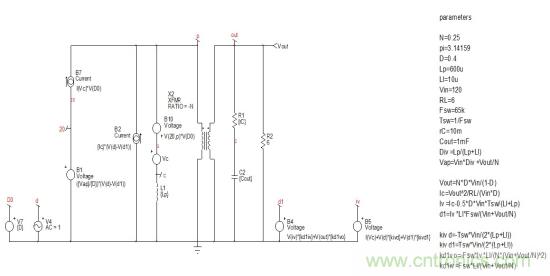
圖5:考慮恒定的輸入電壓,節(jié)電“a”可接地并進(jìn)一步簡(jiǎn)化,得出小信號(hào)電路。
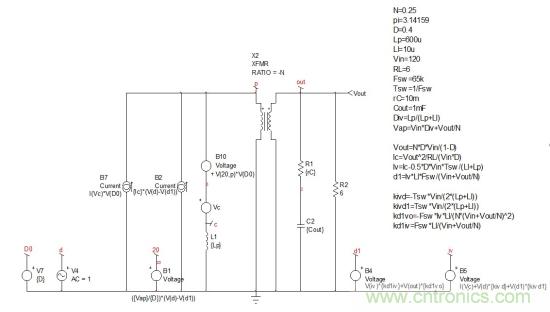
圖6:電流源B7現(xiàn)在接地,而B(niǎo)1在節(jié)點(diǎn)20提供電壓。
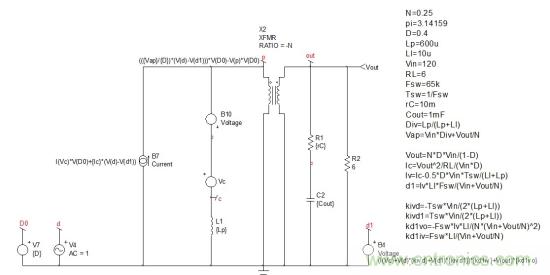
圖7:只要電流源并聯(lián)到B7和節(jié)點(diǎn)20整合到B10,我們可得出最終的小信號(hào)電路原理圖。Iv已整合到d1。
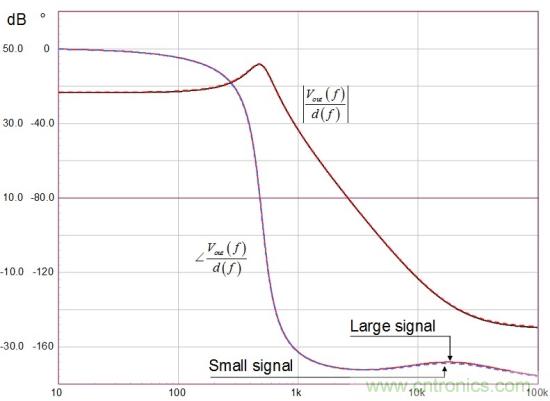
圖8:大信號(hào)模型的頻率響應(yīng)和我們簡(jiǎn)化電路圖7的頻率響應(yīng)相同
生成等式
我們從電感電流等于節(jié)點(diǎn)“c”的電壓除以電感阻抗開(kāi)始。節(jié)點(diǎn)“c”的電壓由節(jié)點(diǎn)“p”的電壓與電壓源B10串聯(lián)定義。節(jié)點(diǎn)“p”的電壓只是減去通過(guò)變壓器匝數(shù)比N(忽略二極管正向壓降)反射到初級(jí)端的輸出電壓。我們有
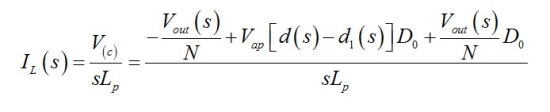 (15)
(15)源d1可改寫(xiě),因?yàn)長(zhǎng)p的電流現(xiàn)已被定義(它是圖7 d1源的I(Vc))
 (16)
(16)解得d1(s)為
 (17)
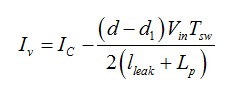
(17)輸出電流是以變壓器匝數(shù)比N縮放的初級(jí)電流。它是由源B7減去流經(jīng)電感的電流及由(15)定義的電流:
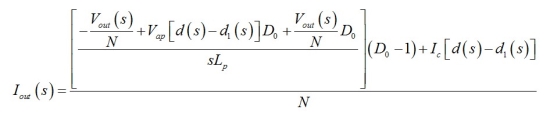 (18)
(18)在此表達(dá)式中,Ic是在本系列文章第二部分已確定的直流值
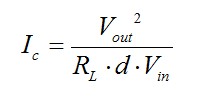 (19)
(19)這電流以由如圖9所示的rC,Cout和負(fù)載電阻RL形成的阻抗循環(huán)。
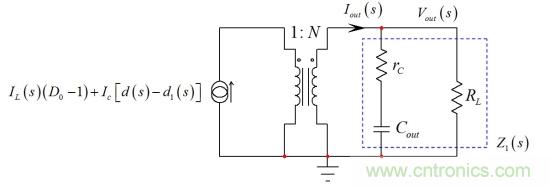
圖9:最終描述包括變壓器驅(qū)動(dòng)由輸出電容、ESR和負(fù)載電阻形成的復(fù)雜的阻抗RL。
這輸出電流也可定義為
 (20)
(20)阻抗可通過(guò)將rC + Cout和RL并聯(lián)或應(yīng)用快速分析電路技術(shù)(FACTS)迅速得出。重新整理結(jié)果,您應(yīng)發(fā)現(xiàn)
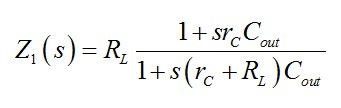 (21)
(21)現(xiàn)在結(jié)合(18)、 (20) 和(21),我們可寫(xiě)
 (22)
(22)現(xiàn)在的樂(lè)趣在于求解Vout,并以二階多項(xiàng)式的形式重新整理傳遞函數(shù)。通過(guò)Mathcad的幫助,我們得出:
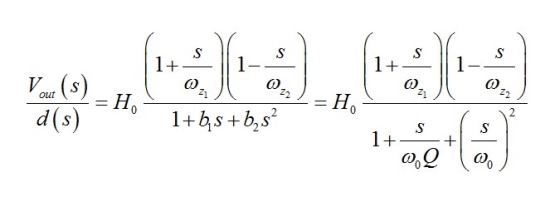 (23)
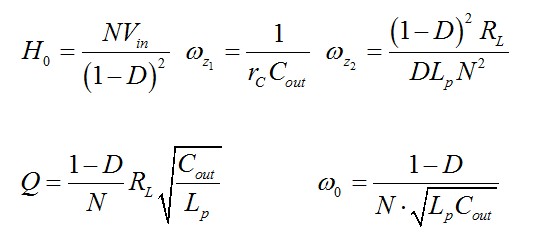
(23)其中我們已確定以下原系數(shù)
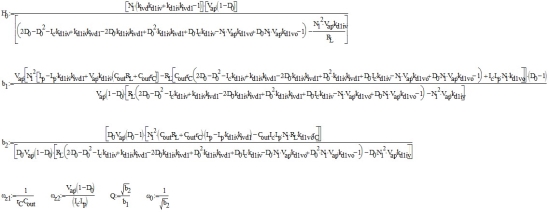
文獻(xiàn)中給出的典型的反激式轉(zhuǎn)換器的傳遞函數(shù)按照(23)的形式并采用下面的定義:
測(cè)試解析表達(dá)式
如果我們假設(shè)圖1的運(yùn)行值,并繪制由(23)給出的響應(yīng),無(wú)論是lleak為0 (rC= 0歐)的復(fù)雜系數(shù)還是簡(jiǎn)化的反激式表達(dá)式,幅值和相位曲線如圖10所示都完全重疊。
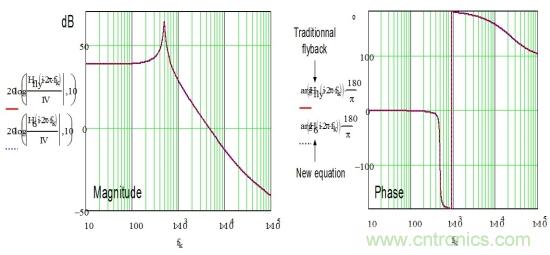
圖10:當(dāng)漏電感設(shè)為0,采用復(fù)雜系數(shù)的等式和傳統(tǒng)的反激式表達(dá)式返回相同的頻率響應(yīng)曲線。
接下來(lái)的測(cè)試包括設(shè)置lleak為10 μH、疊合由Mathcad和小信號(hào)SPICE仿真得出的曲線。如圖11所示,曲線的完美重疊證實(shí)了我們對(duì)傳遞函數(shù)考慮漏電感的數(shù)學(xué)推導(dǎo)。
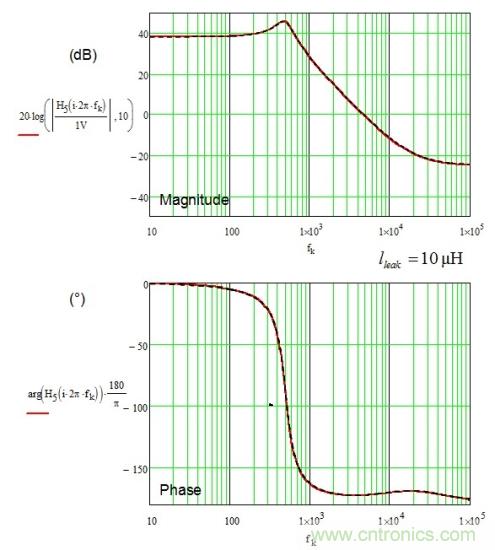
圖11:SPICE和Mathcad繪制出完全重疊的曲線,證實(shí)了我們圖4的關(guān)于傳遞函數(shù)中Vout結(jié)合d的分析推導(dǎo)。
最后,為將我們的建模方案與另一個(gè)仿真平臺(tái)比較,我的同事Dr. Capilla采集了在第一部分介紹的以Simplis模板簡(jiǎn)化的逐周期模型,并運(yùn)行幾個(gè)配置以提取小信號(hào)響應(yīng)。結(jié)果如圖13所示,其中我們已粘貼了采用小信號(hào)模型得到的SPICE仿真結(jié)果。
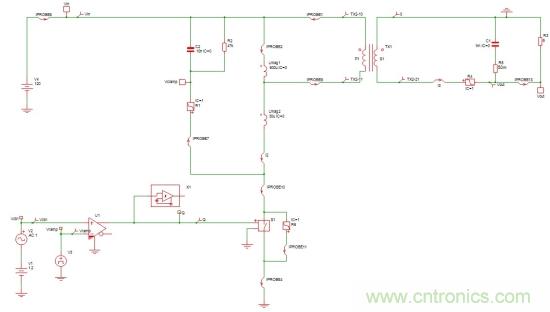
圖12:Simplis可提取開(kāi)關(guān)電路的小信號(hào)響應(yīng)
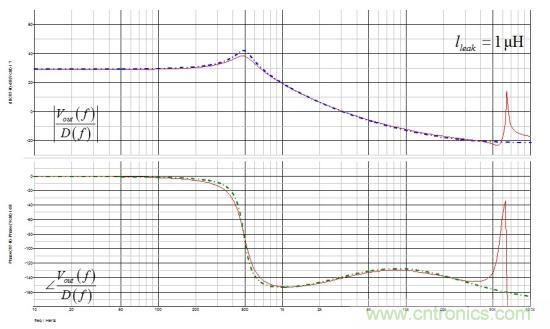
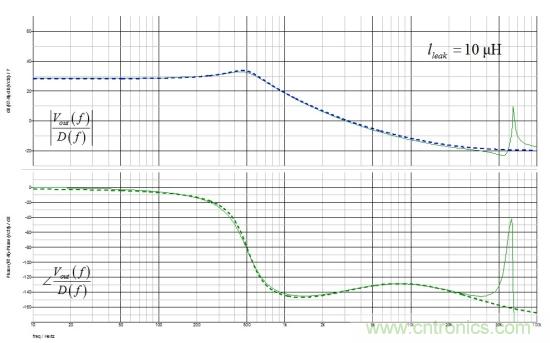

圖13:Simplis的交流響應(yīng)顯示相較SPICE平均模型略有阻尼的電路
對(duì)于1-μH漏電感值,Simplis顯示出稍低的Q,可能是由于仿真電路中一些選定的開(kāi)關(guān)元件固有的損耗。對(duì)于較高的漏電感值(10和30 μH),符合得非常好,曲線幾乎重疊。
漏電感和品質(zhì)因數(shù)
現(xiàn)在我們的模型是正確的,我們可交流掃描圖1電路,并看漏電感如何影響幅值和相位曲線。在具低漏電感時(shí),Q很明顯,超過(guò)10 dB。當(dāng)漏電感增加,每切換周期損耗更多能量,品質(zhì)因數(shù)減弱。對(duì)于大電感值30 μH,系統(tǒng)變得過(guò)阻尼。
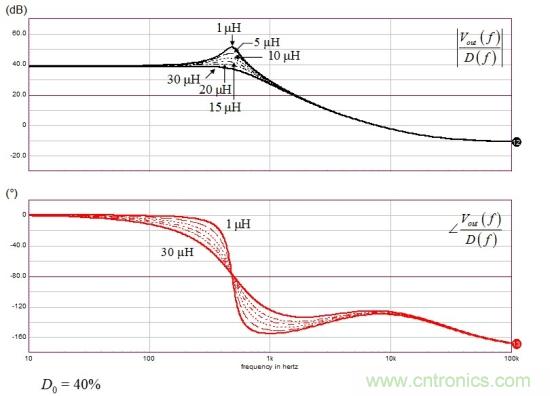
圖14:增加漏電感明顯阻尼工作于電壓模式的CCM反激式轉(zhuǎn)換器的響應(yīng)。
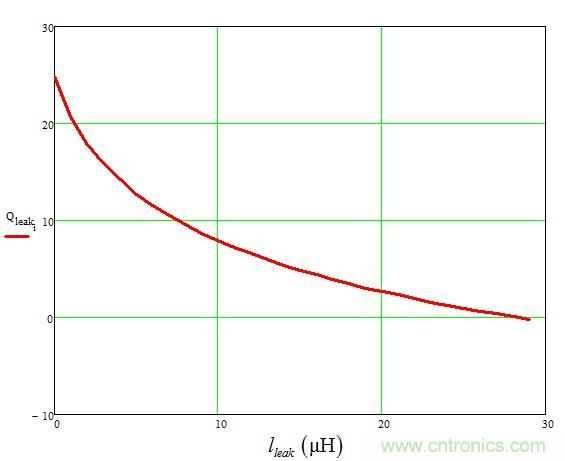
在圖15中,我們已繪制出Q相對(duì)漏電感的值,證實(shí)了它對(duì)反激式轉(zhuǎn)換器的阻尼效應(yīng)。
在電流模式中,占空比截?cái)嘞?,因?yàn)楸M管存在漏電感,但峰值電流不受影響,因?yàn)閠on自然延長(zhǎng)至符合峰值設(shè)定點(diǎn)。如[1]所寫(xiě),它可標(biāo)明電流模式控制(CCM)中的開(kāi)關(guān)占空比定義為
 (24)
(24)其中Fsw是開(kāi)關(guān)頻率,Vc是控制電壓,Ri是檢測(cè)電阻,Ic是如(19)定義的端點(diǎn)“c”的電流,Sa是外部補(bǔ)償斜率,Vac是端點(diǎn)“a”和“c”之間的電壓。雖然漏電感增加,但有效的占空比(開(kāi)關(guān)占空比由漏電感磁化時(shí)間減少)保持相對(duì)穩(wěn)定。因此,主要是次級(jí)電流的延遲影響了輸出電壓。但輸出電壓的降低在電流模式控制中低于電壓模式轉(zhuǎn)換器(圖16)。
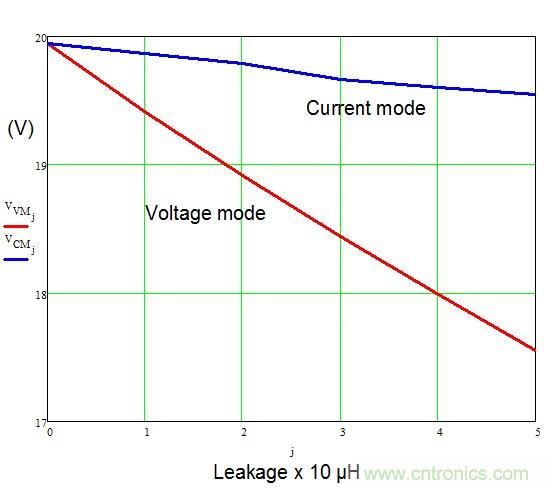
圖16:在電流模式中,峰值電流保持穩(wěn)定,導(dǎo)通時(shí)間自然延長(zhǎng)以補(bǔ)償漏電感的存在。因此,不像電壓模式控制,輸出電壓幾乎不受影響。
結(jié)論
在這最后一部分,我們已描述了CCM反激式轉(zhuǎn)換器在電壓模式控制下的控制-輸出的傳遞函數(shù)。漏電感增加了鉗位源損耗并提供阻尼:傳統(tǒng)的等式?jīng)]有預(yù)測(cè)這一行為,必須推導(dǎo)新模型。進(jìn)一步的線性化過(guò)程中,必須確定性的小信號(hào)傳遞函數(shù),表示漏電感對(duì)品質(zhì)因數(shù)的影響。但電流模式控制受漏電感的影響較小。參考[2]和[3]指出文獻(xiàn)意識(shí)到漏電感的影響,但在更新的傳遞函數(shù)表達(dá)式中沒(méi)有規(guī)范地定義這影響。本文完成了這一工作。
免責(zé)聲明:本文為轉(zhuǎn)載文章,轉(zhuǎn)載此文目的在于傳遞更多信息,版權(quán)歸原作者所有。本文所用視頻、圖片、文字如涉及作品版權(quán)問(wèn)題,請(qǐng)聯(lián)系小編進(jìn)行處理。
推薦閱讀:
