
【導讀】本項目基于FPGA,設計小車蹺蹺板平衡控制系統(tǒng),前期已經(jīng)做好了充分的理論準備工作,本文接著詳解其實施方案,一起來看看方案的可行性。
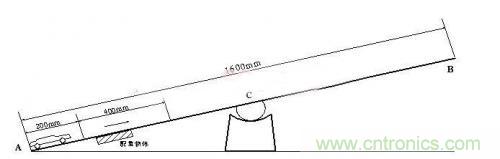
本項目基于FPGA,以FPGA為核心,制作一個電動小車控制器,使小車能夠自動沿一個寬30cm,長160cm的翹翹板尋跡行駛,并能調(diào)節(jié)小車位置使翹翹板傾斜某一設定角度,保持靜止平衡。當另有外力使翹翹板失衡時,小車自動尋找新的平衡點,使翹翹板重新達到平衡。如圖1、圖2所示。系統(tǒng)靜態(tài)誤差小于1度,超調(diào)量小于10%。項目制作中,將通過理論研究和反復實驗對控制算法和控制參數(shù)進行優(yōu)化力求達到最快調(diào)節(jié)速度和最小誤差,為控制工程提供一個真實的物理仿真實驗裝置。
圖一

圖二
目前的進展情況:
本項目于前期已做了較為充分的理論準備工作,經(jīng)過理論推導,建立了受控對象和控制系統(tǒng)的數(shù)學模型,研究和比較了系統(tǒng)的相關控制算法。項目車體部分、光電傳感器部分、電機驅動部分、角度傳感器部分、信號調(diào)理放大電路、電機驅動電路、系統(tǒng)供電電路等部件均已設計制作完成,有關的外圍電路印制板也已焊接調(diào)試成功,并分別通過調(diào)試。目前正在對系統(tǒng)進行優(yōu)化和改進,并著手編寫程序,待獲得FPGA開發(fā)平臺后,即可開始程序調(diào)試及系統(tǒng)聯(lián)調(diào)實驗。
項目關鍵技術及創(chuàng)新點的論述:
本項目的關鍵技術在于利用FPGA的快速數(shù)據(jù)處理功能和豐富靈活的接口資源,建立一個能對小車翹翹板系統(tǒng)進行控制的硬件平臺,在此基礎上研究各種控制算法,應用實驗平臺對控制算法進行驗證,對翹翹板的非穩(wěn)定平衡狀態(tài)進行有效的控制,使之處于平衡靜止狀態(tài)并能夠保持。本項目的受控對象是一個非線性高階系統(tǒng),在控制領域中是人們感興趣而又難以被控制的過程,其相關研究結論可應用于飛行器姿態(tài)控制、機器人平衡控制等方面,涉及非線性信號處理、非線性控制、控制參數(shù)自動優(yōu)化等技術。
本項目的創(chuàng)新點在于,把FPGA的高速并行數(shù)據(jù)處理特性綜合應用到了一個在控制領域中人們所感興趣而又難以被控制的非穩(wěn)定受控過程中,利用FPGA為控制系統(tǒng)研究提供了一個通用性好,廉價而實用的實驗平臺,為理論研究結果建立一個實驗物質條件,增強理論和實踐的相結合。同時,該項目富有趣味性和知識性,可以激發(fā)更多電子愛好者的興趣,擴大FPGA的應用層面。
技術成熟性和可靠性論述:
小車平衡態(tài)的控制類似于倒立擺,但又有所不同。倒立擺控制已經(jīng)有較多的研究,并已應用于機器人平衡,飛行器姿態(tài)控制等。理論和實踐都證明系統(tǒng)是可實現(xiàn)的。小車的控制采樣周期大約毫秒數(shù)量級就可滿足基本要求,所以,F(xiàn)PGA的速度完全可以滿足要求。而FPGA所具有的靈活的邏輯組合配置,足以完成小車運行所需要的控制邏輯和運行協(xié)調(diào)。系統(tǒng)所使用的各傳感器及其信號調(diào)理電路已經(jīng)調(diào)試成功。這些先行工作和已成熟技術為系統(tǒng)的成功實現(xiàn)提供聯(lián)保證條件。在可靠性方面,系統(tǒng)各部件之間的連接將采用高可靠的連接器件,并用熱封膠密封,機械緊固件采取鎖緊措施。由于系統(tǒng)不與外界電氣連接,不存在共模電壓干擾,因此不考慮使用光電隔離。在軟件方面,采用看門狗定時器,保證系統(tǒng)程序跑飛后能夠自動恢復運行。
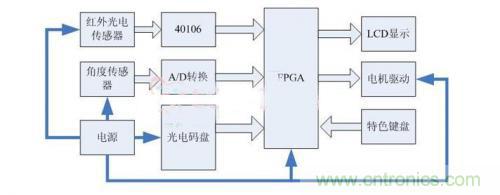
圖3
項目實施方案
1.方案基本功能框圖及描述
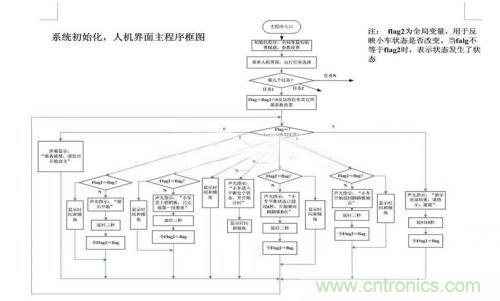
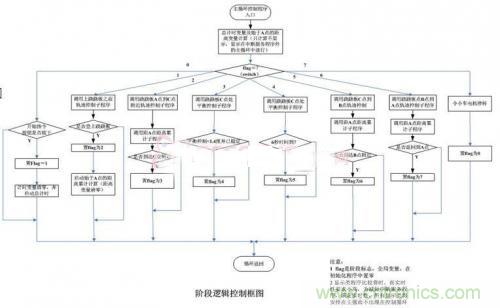
系統(tǒng)框圖如圖3所示,主控循環(huán)程序每隔一個采樣周期從FPGA接口中讀取各個傳感器的數(shù)值,并經(jīng)過處理后獲得小車的運行狀態(tài),根據(jù)小車的當前狀態(tài)采取相應的控制算法計算出電機所需的控制電壓值,進而,該控制電壓值經(jīng)過PMW處理后輸出到小車驅動電機,使小車按照希望的規(guī)律運動。為了使程序流程清晰簡潔,框圖中以一個標志信號來記錄小車所運行的階段,控制器則根據(jù)小車所處的運行階段進行相應的控制。
2.需要的開發(fā)平臺
根據(jù)本系統(tǒng)所需達到功能要求和性能要求,系統(tǒng)需要完成傳感器模擬量的數(shù)據(jù)采集和光電傳感器電平數(shù)據(jù)的采集,需要對采集的數(shù)據(jù)進行處理和輸出,需要對小車的狀態(tài)進行判斷和控制等。Spartan-3E芯片(XC3S500E-4FG320C)具有速度高,接口豐富等特點,根據(jù)系統(tǒng)要求和所要完成的功能,Spartan-3E芯片(XC3S500E-4FG320C)配以相應的開發(fā)環(huán)境,完全可以完成系統(tǒng)控制要求,且價廉實惠,開發(fā)過程快捷,簡單易行。為了能夠使用Spartan-3E初級板,本項目需要與Spartan-3E初級板相配套的開發(fā)軟件和編譯調(diào)試工具和環(huán)境。
3.方案實施過程中需要開發(fā)的模塊
在本方案中需要研制、開發(fā)的功能主要模塊,以及開發(fā)的方式
本方案中,所要研制的硬件模塊包括:1)尋跡用紅外光電傳感器模塊及其波形整形電路,2)用于檢測小車運行位移和速度的紅外光電編碼器模塊,3)用于為不同元件提供不同電壓的電源變換模塊,4)用于檢測小車傾角的角度傳感器信號調(diào)理模塊,5)用于驅動直流伺服電機的驅動模塊,6)用于顯示系統(tǒng)狀態(tài)和輸入指令的人機界面模塊,7)AD轉換模塊,8)碰觸檢測模塊,8)在擴展功能中,用于擴大檢測小車狀態(tài)的視頻處理模塊,等等。
軟件系統(tǒng)中也按模塊編程,包括:1)人機交互模塊,2)電機驅動PWM運算模塊,3)平衡控制計算模塊,4)運行軌跡尋找與跟蹤模塊,信號檢測及標度模塊,5)系統(tǒng)協(xié)調(diào)模塊
4.系統(tǒng)最終要達到的性能指標
該項目將完成小車的自動尋跡和平衡控制,平衡保持時間可按照要求任意設定。小車在引導線的引導下自動登爬蹺蹺板,并在平衡位置達到靜態(tài)平衡。從登陸蹺蹺板到進入平衡狀態(tài)所需時間不大于20秒。系統(tǒng)靜態(tài)誤差小于1度,超調(diào)量小于10%。在基本功能實現(xiàn)的情況下,將進一步優(yōu)化參數(shù),提高運行速度和減少調(diào)節(jié)時間和靜態(tài)誤差。
需要的其它資源
1.設計輸入輸出功能子板
子板功能為:1)產(chǎn)生系統(tǒng)所需的各種電壓,為系統(tǒng)各部件提供電源。2)為角度傳感器提供參考電源,對角度傳感器的輸出信號進行放大調(diào)理,并進行AD轉換,得到與角度成比例的數(shù)字信號。3)將紅外光電傳感器的電壓信號整形為標準邏輯電平。4)將控制信號放大,為直流電機提供驅動能力。
子板接口為標準pin口,使用標準接插件。
2.測試設備
PC機、萬用表、直流穩(wěn)壓電源、秒表、卷尺、量角器等
3.方針、開發(fā)工具
Spartan-3E初級板,ISE9.1,Modesim se,EDK9.1,Synplify pro,Chipscope pro9.1
相關推薦閱讀:
我愛快包——電子工程師的外快錢包
相關推薦閱讀:
我愛快包——電子工程師的外快錢包
