
【導(dǎo)讀】在設(shè)計(jì)監(jiān)控工業(yè)設(shè)備和應(yīng)用的機(jī)械操作時(shí), 選擇合適的振動(dòng)傳感器是不可或缺環(huán)節(jié)的。本文分析了工業(yè)生產(chǎn)中因振動(dòng)而引發(fā)的故障類型及其成因,包括不平衡、錯(cuò)位、滾動(dòng)軸承缺陷和輪齒故障,在此基礎(chǔ)上總結(jié)出監(jiān)測(cè)這些振動(dòng)所需的振動(dòng)傳感器及其系統(tǒng)參數(shù)和規(guī)格要求。此外,還特別介紹了高階的加速計(jì)運(yùn)動(dòng)傳感器在振動(dòng)感測(cè)中的應(yīng)用,以實(shí)現(xiàn)具有高分析能力的解決方案及系統(tǒng)。
在設(shè)計(jì)監(jiān)控工業(yè)設(shè)備和應(yīng)用的機(jī)械操作時(shí), 選擇合適的振動(dòng)傳感器是不可或缺環(huán)節(jié)的。本文分析了工業(yè)生產(chǎn)中因振動(dòng)而引發(fā)的故障類型及其成因,包括不平衡、錯(cuò)位、滾動(dòng)軸承缺陷和輪齒故障,在此基礎(chǔ)上總結(jié)出監(jiān)測(cè)這些振動(dòng)所需的振動(dòng)傳感器及其系統(tǒng)參數(shù)和規(guī)格要求。此外,還特別介紹了高階的加速計(jì)運(yùn)動(dòng)傳感器在振動(dòng)感測(cè)中的應(yīng)用,以實(shí)現(xiàn)具有高分析能力的解決方案及系統(tǒng)。
前言
現(xiàn)今半導(dǎo)體技術(shù)的能力與進(jìn)步已推進(jìn)至感知(sense)、測(cè)量(measure)、理解(interpret)和分析數(shù)據(jù)(data-analyze)的工業(yè)應(yīng)用,尤其是基于條件監(jiān)視的解決方案。
以MEMS技術(shù)為基礎(chǔ)的新一代傳感器應(yīng)用于診斷和預(yù)防時(shí),基于應(yīng)用程序的先進(jìn)算法,可擴(kuò)展至測(cè)量不同監(jiān)控設(shè)備,有效延長(zhǎng)設(shè)備正常運(yùn)行時(shí)間,提高工業(yè)過(guò)程的質(zhì)量。為了實(shí)現(xiàn)這些新功能并讓狀態(tài)監(jiān)控 (Condition-Monitoring) 行之有效,新的解決方案必須準(zhǔn)確、可靠且穩(wěn)健,因此,實(shí)時(shí)監(jiān)控 (real-time monitoring) 除了對(duì)基本的范圍檢測(cè)之外,還要擴(kuò)展到潛在的設(shè)備故障及防范預(yù)測(cè),以及提供可行性及實(shí)時(shí)的信息反饋。
“振動(dòng)”是機(jī)器發(fā)生事故后一個(gè)需要注意的關(guān)鍵因素,因此了解“振動(dòng)”有利于更有效地實(shí)現(xiàn)高級(jí)的診斷和預(yù)測(cè),最終實(shí)現(xiàn)高級(jí)的振動(dòng)監(jiān)測(cè)解決方案。
本文通過(guò)分析工業(yè)自動(dòng)化應(yīng)用中的主要機(jī)器故障類型——包括不平衡、錯(cuò)位、齒輪故障和滾動(dòng)軸承缺陷——進(jìn)而了解振動(dòng)傳感器的相關(guān)性能與參數(shù),以因應(yīng)故障感測(cè)之需,同時(shí)協(xié)助工程師順利完成在系統(tǒng)開發(fā)及選料上的工作。
不平衡
“不平衡(Imbalance)”是指因負(fù)載分布不均勻?qū)е碌馁|(zhì)量中心偏離旋轉(zhuǎn)中心。系統(tǒng)失衡可歸因于不正確的安裝,例如耦合偏心率、系統(tǒng)設(shè)計(jì)錯(cuò)誤、組件故障等,甚至碎屑或其他污染物的積聚,或灰塵和油脂積聚。
雖然整體系統(tǒng)振動(dòng)的增加可能會(huì)由以上任何“不平衡”因素造成,但是我們可通過(guò)在頻域 (frequency domain)中進(jìn)行分析,診斷出振動(dòng)增加的根本原因。“不平衡”的系統(tǒng)以系統(tǒng)的旋轉(zhuǎn)速度 ( 本文中稱之為1x) 產(chǎn)生信號(hào),其幅度與旋轉(zhuǎn)速度的平方成正比,即F = m×w2。
「1x」成分通??偸浅霈F(xiàn)在頻域中,因此可通過(guò)測(cè)量1x分量和諧波的幅度來(lái)確定系統(tǒng)不平衡。如果1x的幅度高于基線測(cè)量值,并且諧波遠(yuǎn)小于1x,則表示可能正發(fā)生‘不平衡’的情況。下圖1是“不平衡”發(fā)生時(shí)頻域分布的典型范例。
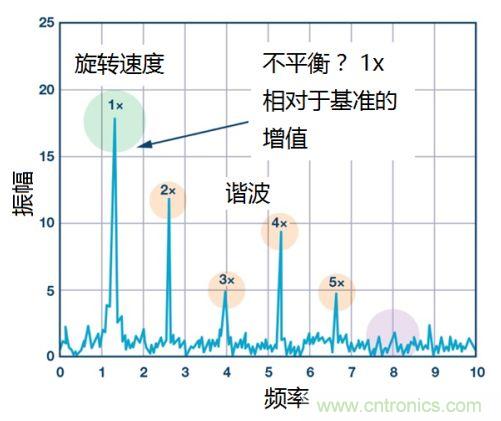
圖1:基于旋轉(zhuǎn)速度,或以1x表達(dá)的頻率的振幅增加,即表示正在發(fā)生“不平衡”的情況 (圖片來(lái)源:ADI)
由此我們可以推斷監(jiān)測(cè)“不平衡”系統(tǒng)時(shí),對(duì)所需振動(dòng)傳感器的要求包括:
1) 需要有低噪聲特性以減少傳感器影響,并能夠檢測(cè)由不平衡系統(tǒng)產(chǎn)生的小信號(hào)。這對(duì)于傳感器、信號(hào)調(diào)理和采樣平臺(tái)非常重要。
2) 需要采樣系統(tǒng)有足夠的分辨率來(lái)提取信號(hào)(尤其是基線信號(hào))以檢測(cè)這些小的不平衡。
3) 帶寬是捕獲旋轉(zhuǎn)速率以外的足夠信息所必需的,這有助于提高診斷的準(zhǔn)確性和可信度。1x諧波可能會(huì)受到其他系統(tǒng)故障(例如未對(duì)準(zhǔn)或機(jī)械松動(dòng))的影響,因此對(duì)轉(zhuǎn)速或1x頻率的諧波進(jìn)行分析可以幫助區(qū)別系統(tǒng)噪聲和其他潛在故障。在旋轉(zhuǎn)機(jī)器上,基本轉(zhuǎn)速可以遠(yuǎn)低于10rpm,這意味著傳感器的低頻響應(yīng)對(duì)于捕獲基本轉(zhuǎn)速至關(guān)重要。
錯(cuò)位
與原先設(shè)計(jì)要處理的組件相比,“錯(cuò)位(Misalignment)”會(huì)令組件在更高的壓力或負(fù)載下導(dǎo)致系統(tǒng)或組件過(guò)早產(chǎn)生故障。下圖2中列出了常見的“角錯(cuò)位 (angular misalignment)”及“平行錯(cuò)位 (parallel misalignment)”。
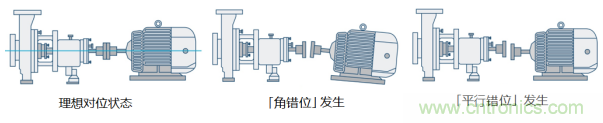
圖2:理想對(duì)位、角錯(cuò)位 (angular misalignment)、平行錯(cuò)位 (parallel misalignment) 狀態(tài)的比較 (圖片來(lái)源:ADI)
“錯(cuò)位”的發(fā)生通??稍谙到y(tǒng)旋轉(zhuǎn)速度的二次諧波 (文中稱為2x) 中找出端倪。一般2x成分并不出現(xiàn)在頻率響應(yīng)中(或存在于較低幅度),但是當(dāng)它出現(xiàn)時(shí),或存在高幅度時(shí),即表示“錯(cuò)位”可能已經(jīng)正在發(fā)生。另外,利用2x與1x之間的比較及其幅度也可以推斷發(fā)生“錯(cuò)位”的類型、位置以及方向信息。圖3顯示了與潛在“錯(cuò)位”故障相關(guān)的信號(hào)。

圖3:2x諧波增加,再加上高諧波增加 (圖片來(lái)源:ADI)
感測(cè)“錯(cuò)位”系統(tǒng)時(shí)應(yīng)考慮的振動(dòng)傳感器的要求包括:
1) 在不同機(jī)器類型、系統(tǒng)和過(guò)程要求中,需要檢測(cè)較細(xì)微的未對(duì)準(zhǔn)或在機(jī)器可容忍的公差中感測(cè)故障,低噪聲和足夠的分辨率是需考慮的因素之一。
2) 由于1倍諧波會(huì)受到其他故障影響,系統(tǒng)可能需要捕獲及分析諧波1×頻率及以上的高倍諧波,這有助于區(qū)別其他故障。為實(shí)現(xiàn)系統(tǒng)高質(zhì)的準(zhǔn)確性和可信度,擁有足夠的診斷頻率帶寬 (Bandwidth)是需要考慮的。
3) 多向性信息的接收可以提高診斷的準(zhǔn)確性并深入了解未對(duì)準(zhǔn)誤差的類型及其偏差的方向,通過(guò)測(cè)量機(jī)器上不同點(diǎn)處的振動(dòng)并確定相位測(cè)量值或整個(gè)系統(tǒng)中的差異,可以洞悉失準(zhǔn)是角度失調(diào)、平行還是兩種失調(diào)類型的組合。
滾動(dòng)軸承缺陷
滾動(dòng)軸承(Rolling Element Bearing Defects)的缺陷通常是由機(jī)械引起的應(yīng)力或潤(rùn)滑問(wèn)題造成的,這些缺陷會(huì)在軸承的機(jī)械部件內(nèi)產(chǎn)生小裂紋或缺陷,從而導(dǎo)致振動(dòng)增加。圖4提供了一些滾動(dòng)軸承的示例,并描述了可能發(fā)生的缺陷。
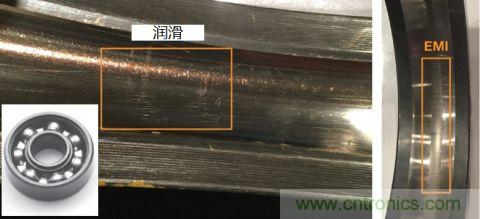
圖4:滾動(dòng)軸承 (圖中)及其潤(rùn)滑和放電電流缺陷的示例。(圖片來(lái)源:ADI)
滾動(dòng)軸承幾乎在所有旋轉(zhuǎn)機(jī)械中都可以找到,從大型渦輪機(jī)到較慢的旋轉(zhuǎn)電機(jī),從相對(duì)簡(jiǎn)單的風(fēng)扇到高速打摩主軸,全依賴滾動(dòng)軸承的運(yùn)作。軸承缺陷可能是潤(rùn)滑污染、安裝不當(dāng)、高頻放電電流或系統(tǒng)負(fù)載的損耗。雖然診斷軸承故障的技術(shù)很多,但是可以根據(jù)軸承設(shè)計(jì)背后的物理原理,例如軸承的幾何形狀、旋轉(zhuǎn)速度和缺陷類型來(lái)計(jì)算每個(gè)軸承的缺陷頻率,再?gòu)念l域分布圖中分析從而完成故障診斷。
來(lái)自特定機(jī)器或系統(tǒng)的振動(dòng)數(shù)據(jù)分析通常依賴于時(shí)域(time domain)和頻域分析的結(jié)合。時(shí)域分析對(duì)于檢測(cè)系統(tǒng)振動(dòng)水平整體上升的趨勢(shì)很有用。但是,這類分析中幾乎沒(méi)有診斷信息。頻域分析可提高診斷能力,但由于其他系統(tǒng)振動(dòng)的影響,識(shí)別故障頻率可能很復(fù)雜。為減少其復(fù)雜性,早期的診斷十分重要,但此早期階段的故障識(shí)別是需要利用頻域分布的諧波圖,配合頻譜分析 (Spectral Analysis) 來(lái)識(shí)別早期故障。圖5提供了利用頻域以及頻譜分析進(jìn)行診斷信息的范例。
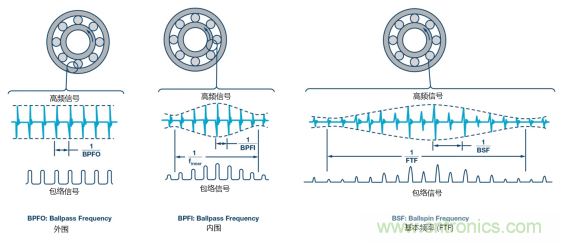
圖5 :應(yīng)用包絡(luò)信息( Envelope Signal)檢測(cè)技術(shù)從寬帶振動(dòng)數(shù)據(jù)中獲取早期軸承缺陷特征。(圖片來(lái)源:ADI)
診斷滾動(dòng)軸承故障所需振動(dòng)傳感器規(guī)格要求包括:
1) 低噪聲和足夠的分辨率對(duì)于檢測(cè)早期軸承缺陷至關(guān)重要。通常,這些缺陷特征在缺陷發(fā)作期間幅度較小。由于設(shè)計(jì)公差,軸承固有的機(jī)械滑動(dòng)會(huì)通過(guò)在軸承的頻率響應(yīng)中將振幅信息分布到多個(gè)空位中來(lái)進(jìn)一步降低振動(dòng)的幅度,因此需要較低的噪聲才能更早地檢測(cè)到信號(hào)。
2) 帶寬對(duì)于早期檢測(cè)軸承缺陷至關(guān)重要。每次在旋轉(zhuǎn)過(guò)程中擊中缺陷都會(huì)產(chǎn)生一個(gè)包含高頻成分的脈沖。對(duì)于這些早期故障,需要監(jiān)視軸承缺陷頻率的諧波,而不是轉(zhuǎn)速。由于軸承缺陷頻率與轉(zhuǎn)速之間的關(guān)系,這些早期信號(hào)可能出現(xiàn)在幾千赫茲的范圍內(nèi),并遠(yuǎn)遠(yuǎn)超出了10kHz至20kHz的范圍。即使對(duì)于低速設(shè)備,軸承缺陷的固有特性也需要更寬的頻率范圍。用于早期檢測(cè)的帶寬,以避免受到影響較低頻段的系統(tǒng)諧振和系統(tǒng)噪聲的影響。
3) 動(dòng)態(tài)范圍對(duì)于軸承缺陷監(jiān)測(cè)也很重要,因?yàn)橄到y(tǒng)負(fù)載和缺陷會(huì)影響系統(tǒng)所經(jīng)歷的振動(dòng)。增加的載荷導(dǎo)致作用在軸承和缺陷上的力增加。軸承缺陷還會(huì)產(chǎn)生激發(fā)結(jié)構(gòu)共振的脈沖,從而放大系統(tǒng)和傳感器所經(jīng)歷的振動(dòng)。隨著機(jī)器在停止/啟動(dòng)條件或正常運(yùn)行期間速度的上升和下降,不斷變化的速度為系統(tǒng)共振提供了潛在的機(jī)會(huì),傳感器飽和會(huì)導(dǎo)致信息丟失、錯(cuò)誤診斷,并且在某些技術(shù)的情況下會(huì)損壞傳感器元件。
齒輪故障
齒輪故障(Gear Defects)通常是由于疲勞、剝落或點(diǎn)蝕而出現(xiàn)齒根裂紋或齒表面金屬脫落。它們可能是由于磨損、超負(fù)荷、潤(rùn)滑不良、反沖以及偶爾的不當(dāng)安裝或制造缺陷而引起的。
齒輪是許多工業(yè)應(yīng)用中動(dòng)力傳輸?shù)闹饕兀惺芎艽蟮膲毫拓?fù)荷。它們的正常狀況對(duì)于整個(gè)機(jī)械系統(tǒng)的正常運(yùn)行至關(guān)重要。由于在故障附近安裝振動(dòng)傳感器很困難,并且由于系統(tǒng)內(nèi)存在由多種機(jī)械撞擊而產(chǎn)生的背景噪聲,因此很難檢測(cè)出齒輪故障。在更復(fù)雜的變速箱系統(tǒng)中尤其如此,在變速箱系統(tǒng)中,可能存在多個(gè)旋轉(zhuǎn)頻率、齒輪比和嚙合頻率。因此,在齒輪故障的檢測(cè)中可能需要其他測(cè)驗(yàn)方法作互補(bǔ),包括聲發(fā)射分析 (acoustic emissions analysis)、電流信號(hào)分析 (current signature analysis) 和油渣分析 (oil debris analysis)。
在振動(dòng)分析方面,變速箱外殼是加速度計(jì)的典型安裝位置,主要的振動(dòng)模式是在軸向方向上。健全的齒輪會(huì)產(chǎn)生振動(dòng)信號(hào),稱為齒輪嚙合振頻 (gear mesh frequency),這等于軸頻率與齒輪齒數(shù)的乘積,通常還存在一些與制造或組裝公差有關(guān)而產(chǎn)生的振動(dòng)。在圖6中以齒輪為例進(jìn)行了說(shuō)明。當(dāng)發(fā)生局部故障(如牙齒裂痕)時(shí),每次旋轉(zhuǎn)中的振動(dòng)信號(hào)將包括系統(tǒng)在相對(duì)較低的能量水平下對(duì)短時(shí)撞擊的機(jī)械響應(yīng)。這種情況下通常是低幅度的寬帶信號(hào),以及非周期性及非平穩(wěn)的信號(hào)。
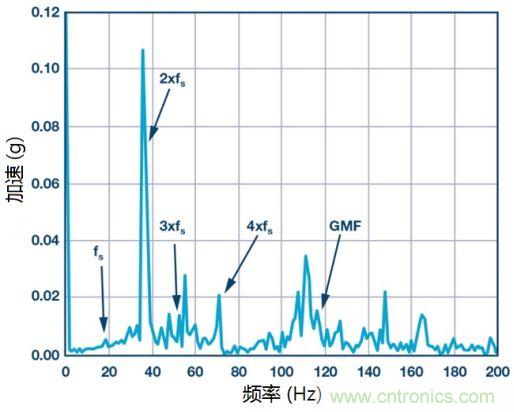
圖6:在健全齒輪轉(zhuǎn)動(dòng)中,當(dāng)軸轉(zhuǎn)速約1000rpm、齒輪轉(zhuǎn)速約290rpm、輪齒數(shù)為24,發(fā)生輪軸“彎曲”故障情況下,頻譜分析圖的狀態(tài) (圖片來(lái)源:ADI)
診斷齒輪故障所需振動(dòng)傳感器規(guī)格要求包括:
1) 帶寬在齒輪故障檢測(cè)中非常關(guān)鍵,因?yàn)辇X輪齒的數(shù)量改變?cè)陬l域分析中以倍數(shù)值增加,所以即使對(duì)于速度相對(duì)較低的系統(tǒng),所需的檢測(cè)頻率范圍也會(huì)迅速提高到多個(gè)kHz。
2) 由于多種原因,分辨率和低噪聲至關(guān)重要。將振動(dòng)傳感器安裝在特定故障區(qū)域附近的難度很大,這意味著機(jī)械系統(tǒng)對(duì)振動(dòng)信號(hào)的衰減可能會(huì)更高,這使得能夠檢測(cè)低能量信號(hào)至關(guān)重要。還要考慮到,由于齒輪問(wèn)題引發(fā)的信號(hào)不一定是靜態(tài)周期(static periodic),因此不能完全依賴?yán)脗鹘y(tǒng)的快速傅立葉變換(Fast Fourier Transform, FFT)技術(shù),從高本底噪聲(noise floor)的環(huán)境中提取低振幅信號(hào),所以要求傳感器本身的本底噪聲必須很低,在變速箱環(huán)境中尤其如此,在變速箱環(huán)境中,來(lái)自變速箱不同元件的多個(gè)振動(dòng)信號(hào)混合在一起。除了這些考慮因素之外,早期檢測(cè)的重要性不僅出于零件保護(hù)的原因,而且出于信號(hào)源本身在故障初期較易發(fā)現(xiàn),例如與后期的多齒斷裂損壞相比,初期單齒斷裂故障的情況下的振動(dòng)嚴(yán)重性可能更高,這意味著在早期階段檢測(cè)可能相對(duì)容易。
傳感器的選料
下列表1 概括了以上四種系統(tǒng)故障類型監(jiān)測(cè)對(duì)應(yīng)的所需傳感器的要求。
表1:不同故障下,傳感器參數(shù)的要求 (圖片來(lái)源:ADI)
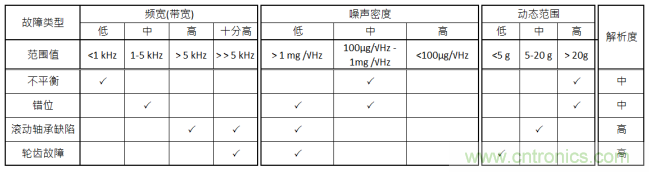
工程師可根據(jù)以上表1,選擇合適的振動(dòng)傳感器。使用參數(shù)恰當(dāng)?shù)恼駝?dòng)傳感器,加上正確使用分析工具,以確定機(jī)械問(wèn)題的具體原因及位置,將會(huì)協(xié)助工程師加快維修速度并降低成本。振動(dòng)傳感器可以用來(lái)測(cè)量和分析位移,線速度和加速度。雖然規(guī)格書內(nèi)的參數(shù)一般直接與應(yīng)用相關(guān)或是通過(guò)數(shù)學(xué)運(yùn)算得知,但是Digi-Key已列出了一些傳感器的重要參數(shù),可以幫助工程師省去這一費(fèi)時(shí)的步驟。
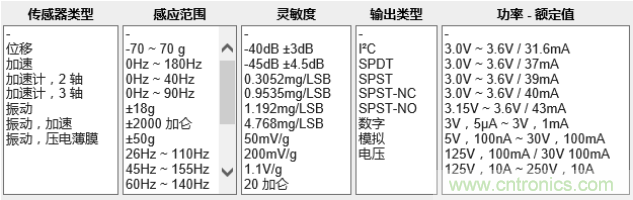
圖7 :振動(dòng)傳感器重要參數(shù)篩選列表
例如 TE Connectivity Measurement Specialties 公司的 LDT 系列,擁有高靈敏度 (50 – 200 mV/g),輸出電壓擺幅可以直接輸入FET或CMOS,將部件靈活運(yùn)用成“開關(guān)”。
有部份工程師會(huì)選擇“加速計(jì)運(yùn)動(dòng)傳感器 ”作振動(dòng)感測(cè)。此類傳感器可以將微小的振動(dòng)感測(cè)如“加速度信號(hào)”,之后放大以進(jìn)行加速度測(cè)量,或者在傳感器內(nèi)將其轉(zhuǎn)換為速度或位移信號(hào)。如今,大多數(shù)用于振動(dòng)監(jiān)測(cè)的壓電傳感器都包含內(nèi)部放大器。運(yùn)算放大器可用于將這些傳感器連接至分立的或微控制器上的A/D轉(zhuǎn)換器。例如Analog Devices 公司的ADXL1005 系列,可為工業(yè)監(jiān)控應(yīng)用提供高帶寬及高噪聲密度的解決方案。使用ADAQ7980作模數(shù)轉(zhuǎn)換,用于測(cè)量0kHz至10kHz的機(jī)械振動(dòng),請(qǐng)參考圖8的示例。
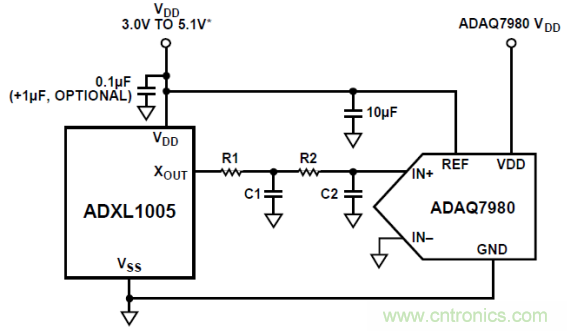
圖8 :ADXL1005 應(yīng)用電路圖 (圖片來(lái)源:ADI)
總結(jié)
因振動(dòng)而引發(fā)的故障類型眾多,四類常見故障分別是不平衡、錯(cuò)位、滾動(dòng)軸承缺陷和輪齒故障,了解了這些故障產(chǎn)生振動(dòng)的原理,就能了解所需的振動(dòng)傳感器及其系統(tǒng)參數(shù)、要求,以便進(jìn)行檢測(cè)和診斷。所以在設(shè)計(jì)監(jiān)控工業(yè)設(shè)備和應(yīng)用的機(jī)械操作時(shí), 選擇合適的振動(dòng)傳感器是不可或缺環(huán)節(jié)的。除了傳統(tǒng)的“振動(dòng)傳感器”,高階的“加速計(jì)運(yùn)動(dòng)傳感器 ”也可以用于振動(dòng)感測(cè),實(shí)現(xiàn)具有高分析能力的解決方案及系統(tǒng)。

