
【導(dǎo)讀】ECL電路(即發(fā)射極耦合邏輯電路Emitter-Couple Logic)是一種非飽和型的數(shù)字邏輯電路,電路內(nèi)晶體管工作在線性區(qū)或截止區(qū),速度不受少數(shù)載流子的存儲(chǔ)時(shí)間的限制,所以它是現(xiàn)有各種邏輯電路中速度最快的一種, 能滿足高達(dá)10Gbps工作速率。最先由Motorola公司提出ECL標(biāo)準(zhǔn)。ECL 的主要分類如下。
PECL VCC=5.0V,VEE=0.0V
LVPECL VCC =3.3V,VEE =0.0V
VCC =2.5V,VEE =0.0V
NECL VCC =0.0V,VEE =-5.2V
LVNECL VCC=0.0V,VEE =-3.3V
VCC =0.0V,VEE =-2.5V
PECL即Positive Emitter-Couple Logic,也就是正發(fā)射極耦合邏輯的意思,使用5.0V電源。PECL 是由ECL 演變而來的,ECL 即Emitter-Couple Logic,也就是發(fā)射極耦合邏輯。ECL 有兩個(gè)供電電壓VCC和VEE。當(dāng)VEE接地時(shí),VCC 接正電壓時(shí),這時(shí)的邏輯稱為PECL;當(dāng)VCC 接地時(shí),VEE接負(fù)電壓時(shí),這時(shí)的邏輯成為NECL,VEE一般接-5.2V電源;一般狹義的ECL 就是指NECL。由于PECL/LVPECL可以和系統(tǒng)內(nèi)其他電路共用一個(gè)正電源供電,所以PECL/ LVPECL相對于ECL應(yīng)用更為廣泛。起初的PECL器件是將VCC接+5V,后來為了直接利用廣泛使用的3.3V和2.5V電壓,出現(xiàn)了VCC=3.3V/2.5V的LVPECL(Low Voltage PECL)。
PECL/LVPECL電路結(jié)構(gòu)
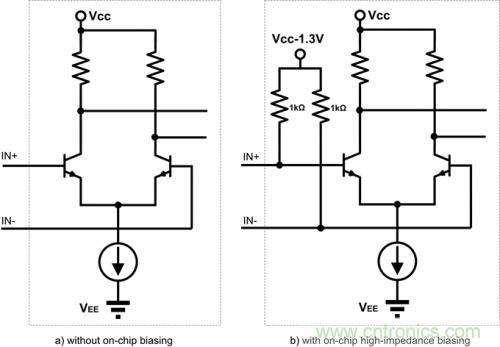
PECL 的輸入是一個(gè)具有高輸入阻抗的差分對,該差分對的共模電壓需要偏置到VBB =VCC-1.3V,這樣允許的輸入信號電平動(dòng)態(tài)最大。對于不同芯片的輸入級,信號允許的共模電平可能會(huì)有些差異,請參考相應(yīng)的datasheet。有部分芯片在內(nèi)部已經(jīng)集成了偏置電路,使用時(shí)直接連接即可,有的芯片沒有加,使用時(shí)需要在芯片外部加直流偏置。
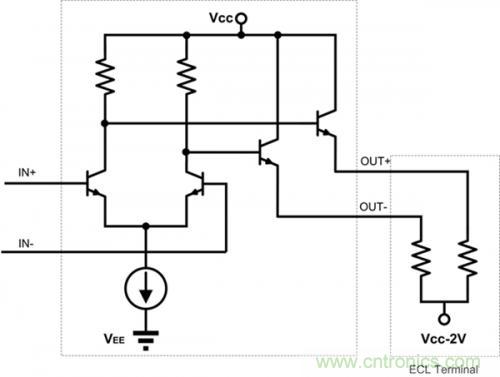
PECL的標(biāo)準(zhǔn)輸出負(fù)載是串聯(lián)50ohm至VCC-2V的電平上,在這種負(fù)載條件下,OUT+與OUT-的共模電壓是VBB=VCC-1.3V,OUT+/OUT-的輸出的平均電流為14mA。
ECL電路優(yōu)缺點(diǎn)
1、ECL 邏輯的優(yōu)點(diǎn):
1)扇出能力強(qiáng)。ECL輸出阻抗低(6~8ohm),輸出阻抗高(通常為10kohm),所以扇出系數(shù)很高。
2)噪聲低,對電源要求低。ECL/PECL器件對電源電壓的同步變化是不太敏感的,因此可以在ECL某些應(yīng)用中相對地放松對電源波紋、偏差和分配的要求。有時(shí)允許電路的電源電壓范ECL圍可寬至10%。由于差分電路兩臂交替工作,電路工作時(shí)電源電流基本上恒定(不隨邏輯狀態(tài)變化而變化,也不隨工作頻率增加而增加),因此可以考慮放寬對電源內(nèi)阻的要求。
3)速度快。晶體管工作時(shí)不進(jìn)入飽和狀態(tài),只工作在線性區(qū)和截止區(qū),沒有少數(shù)載流子的存儲(chǔ)現(xiàn)象,開關(guān)時(shí)間大為縮短;集電結(jié)電容大大減小,RC時(shí)間常數(shù)也相應(yīng)減小,電路的傳輸延遲時(shí)間就很短;電路的邏輯電平擺幅?。▎味诵∮?50mV),在動(dòng)態(tài)轉(zhuǎn)換過程中各個(gè)結(jié)上的電壓變化對結(jié)電容(包括寄生電容)的充放電時(shí)間很短。
2、ECL 邏輯的缺點(diǎn):
1)ECL的缺點(diǎn)也很明顯,那就是功耗大。可以說,ECL 的高速性能是用高功耗為代價(jià)換來的。
ECL信號互連
ECL邏輯的高低電平之差一般為800mV,其中心參考電平(共模電壓)VBB根據(jù)VCC變化,一般為VCC-1.3V。因此,PECL的電平隨VCC的不同而不同。如:
PECL:
VBB=5V-1.3V=3.7V,VOH=4.1V,VOL=3.3V;
LVPECL:
VBB=3.3V-1.3V=2V,VOH=2.4V,VOL=1.6V;
VBB=2.5V-1.3V=1.2V,VOH=1.6V,VOL=0.8V;
NECL:(VEE =-5V、-3.3V、-2.5V;VCC=0V),
VBB =0V-1.3V= -1.3V,VOH = -0.9V,VOL =-1.7V。
當(dāng)然,以上的直流特性只是對一般而言,實(shí)際上到具體的器件上還是會(huì)稍有不同,同一器件的輸入和輸出也不一樣。在設(shè)計(jì)的時(shí)候,都應(yīng)該參考相應(yīng)器件的datasheet來獲得其準(zhǔn)確的電氣特征。
關(guān)于直流特性,還有很重要的一點(diǎn)就是兩個(gè)ECL器件之間的接口匹配,也就是說,我們要特別關(guān)注Driver的輸出是否在Receiver的輸入的容差范圍之內(nèi)。我們稱這個(gè)容差范圍為“接收窗口”。如果Driver的輸出沒有落在這個(gè)接收窗口之內(nèi),就有可能造成接收端的誤判,從而造成設(shè)計(jì)上的失敗。
因此看兩個(gè)ECL器件是否能夠互連,對于Driver,只要是從DATASHEET中得到其輸出高電平VOH和輸出低電平的VOL的范圍;對于Receiver,只要看其關(guān)于接收窗口的一些指標(biāo),分兩種情況。
1、單端信號
如果ECL用作單端信號的話(這種情況并不多見),互連分析得方法與LVTTTL,COMS等單端信號的方法類似。
需要關(guān)注的是輸入高電平VIH和輸入低電平VIL的最大和最小值,VIH的最大和最小值構(gòu)成了VIH的接收窗口,VIL的最大和最小值構(gòu)成了VIL的接收窗口。如下圖:
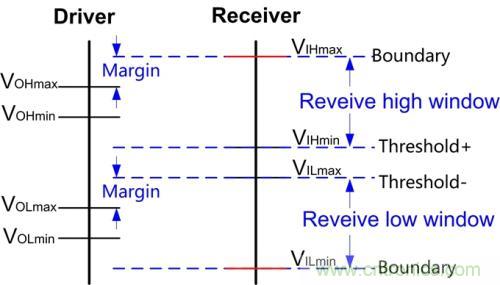
當(dāng)Driver的VOH范圍全部落入Receiver的VIH窗口之內(nèi),Driver的VOL范圍全部落入Receiver的VIL窗口之內(nèi)時(shí),可以保證Receiver可以正確接收Driver的輸出,否則會(huì)有潛在的互連不正確甚至損壞器件的可能。
2、差分信號
對于差分信號,要關(guān)注的指標(biāo)是輸入共模電平VCM和差分信號VDIFF范圍。
如某器件的某輸入口工作在LVPECL模式下。其指標(biāo)如下(AVDDH=2.5V):
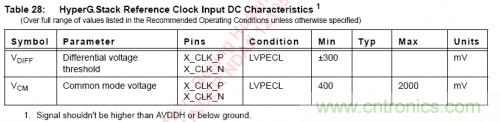
那么其接收窗口如下圖所示,圖中標(biāo)出了共模電壓為最大或者最小時(shí),其允許的最大單端電壓。
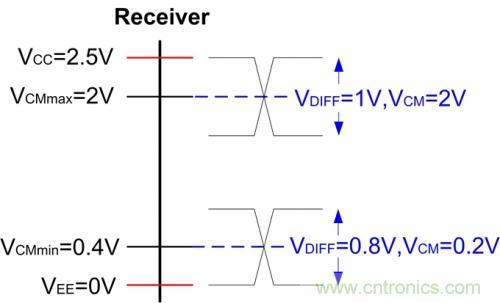
只要落在這個(gè)范圍內(nèi)的差分信號,即同時(shí)滿足:
1.輸出|VDIFF|大于300mV;
2.輸出共模信號VBB位于400 mV到2000mV之間;
3.輸出的單端信號不能超過VCC或者VEE;
滿足以上條件的差分信號都可以被正確接收??梢宰⒁獾剑绻材P盘柋欢私拥絍BB =VCC-1.3V,接受窗口最大。
由上可見,差分信號有比單端信號寬得多的接收窗口,這也是高速應(yīng)用中差分信號被普遍采用的原因之一。
