
【導(dǎo)讀】12月15日,工信部正式印發(fā)了《促進(jìn)新一代人工智能產(chǎn)業(yè)發(fā)展三年行動(dòng)計(jì)劃》,為2018年到2020年人工智能發(fā)展指明了前進(jìn)的方向。計(jì)劃中的重點(diǎn)內(nèi)容是培育八項(xiàng)智能產(chǎn)品和四項(xiàng)核心基礎(chǔ),而智能傳感器正排在核心基礎(chǔ)的第一位,處于最基礎(chǔ)最重要的地位。
萬(wàn)物相連技術(shù)鏈
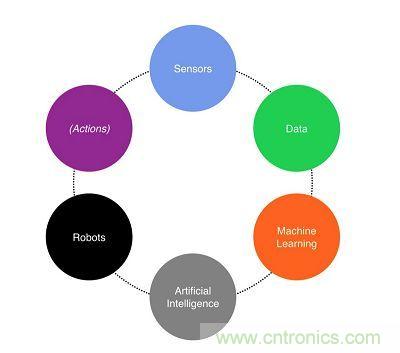
傳感器、大數(shù)據(jù)、機(jī)器學(xué)習(xí)、人工智能和機(jī)器人是怎樣擰在一起了呢?在人工智能時(shí)代硬件和軟件是共生演化的,彼此影響的呢?
“物聯(lián)網(wǎng)”、“大數(shù)據(jù)”和“機(jī)器人”等,其實(shí)這些趨勢(shì)是相互聯(lián)系在一起的,擰成一個(gè)大趨勢(shì), 在這個(gè)鏈條里,每一環(huán)都會(huì)對(duì)下一環(huán)產(chǎn)生影響,如此產(chǎn)生積極的循環(huán)。 各種連接的設(shè)備里的傳感器會(huì)產(chǎn)生大量數(shù)據(jù),海量數(shù)據(jù)使得機(jī)器學(xué)習(xí)成為可能,機(jī)器學(xué)習(xí)的結(jié)果就是AI,而AI又指導(dǎo)機(jī)器人去更精確地執(zhí)行任務(wù),機(jī)器人的行動(dòng)又會(huì)觸發(fā)傳感器。這整個(gè)就是一個(gè)完整的循環(huán)。
1.傳感器產(chǎn)生數(shù)據(jù)
到2014年,連接到互聯(lián)網(wǎng)的設(shè)備超過(guò)了世界人口的總和。 Cisco預(yù)測(cè),到2020年,將有500億個(gè)相互連接的設(shè)備。而這些設(shè)備中大多都會(huì)安傳感器,可能用Electric Imp內(nèi)嵌傳感器,或者用Estimote外接一個(gè)傳感器。
設(shè)備中的傳感器會(huì)產(chǎn)生前所未有的海量數(shù)據(jù)。
2.數(shù)據(jù)支撐機(jī)器學(xué)習(xí)
在2020年,預(yù)計(jì)有35ZB的數(shù)據(jù)產(chǎn)生,也就是2009年數(shù)據(jù)量的44倍。到時(shí)候,不管是結(jié)構(gòu)化的、或更可能是沒(méi)有結(jié)構(gòu)化的數(shù)據(jù)都可以通過(guò)機(jī)器來(lái)處理,從而獲得大量洞見(jiàn)。
3.機(jī)器學(xué)習(xí)改善AI
機(jī)器學(xué)習(xí)依靠數(shù)據(jù)處理和模式識(shí)別,從而讓計(jì)算機(jī)不需要編程就能去學(xué)習(xí)?,F(xiàn)在的海量數(shù)據(jù)和計(jì)算能力都在驅(qū)使機(jī)器學(xué)習(xí)的突破。
機(jī)器學(xué)習(xí)的十足威力,看看Google就知道了。
Google就是利用機(jī)器學(xué)習(xí),把法國(guó)每一個(gè)企業(yè)的位置、每一個(gè)住房、每一條街都繪制在地圖上了。整個(gè)過(guò)程只需1個(gè)小時(shí)。
4.人工智能指導(dǎo)機(jī)器人行動(dòng)
隨著計(jì)算機(jī)已經(jīng)在象棋和路標(biāo)方面做得比人類好了,我們就有理由對(duì)未來(lái)有更多期待。隨著更多的傳感器采集到的數(shù)據(jù)越來(lái)越多,這能優(yōu)化更多的機(jī)器學(xué)習(xí)算法,從而我們可以合乎邏輯地推斷,與機(jī)器人結(jié)合的計(jì)算機(jī)執(zhí)行任務(wù)的能力會(huì)呈指數(shù)級(jí)增長(zhǎng)。
5.機(jī)器人采取行動(dòng)
不僅數(shù)以百計(jì)的公司在制作可以完成各種工作的機(jī)器人,機(jī)器人本身也會(huì)變得越來(lái)越智能, 而且借助AI的進(jìn)步,還能完成很多我們夢(mèng)寐以求的任務(wù)。
6.行動(dòng)觸發(fā)傳感器
機(jī)器采取行動(dòng)觸發(fā)傳感器來(lái)收集數(shù)據(jù),從而整個(gè)循環(huán)就完整了。
這就是整個(gè)人工智能生態(tài)的技術(shù)鏈。
人工智能技術(shù)優(yōu)化傳感器系統(tǒng)
人工智能技術(shù)能夠?qū)鞲衅飨到y(tǒng)有所幫助,它們是:基于知識(shí)的系統(tǒng)、模糊邏輯、自動(dòng)知識(shí)收集、神經(jīng)網(wǎng)絡(luò)、遺傳算法、基于案例推理和環(huán)境智能。這些技術(shù)在傳感器系統(tǒng)中的應(yīng)用越來(lái)越廣泛,不僅因?yàn)樗鼈兇_實(shí)有效,還因?yàn)榻裉斓挠?jì)算機(jī)應(yīng)用越來(lái)越普及。
這些人工智能技術(shù)具有最低的計(jì)算復(fù)雜度,可以應(yīng)用于小型傳感器系統(tǒng)、單一傳感器或者采用低容量微型控制器陣列的系統(tǒng)。正確應(yīng)用人工智能技術(shù)將會(huì)創(chuàng)造更多富有競(jìng)爭(zhēng)力的傳感器系統(tǒng)和應(yīng)用。
人工智能領(lǐng)域的其他技術(shù)進(jìn)步也將會(huì)給傳感器系統(tǒng)帶來(lái)沖擊,包括數(shù)據(jù)挖掘技術(shù)、多主體系統(tǒng)和分布式自組織系統(tǒng)。環(huán)境傳感技術(shù)能夠?qū)⒑芏辔⑿碗娮犹幚砥骱蛡鞲衅骷傻饺粘N锲分?,使其具有智能。它們可以?chuàng)造智能環(huán)境,與其他智能設(shè)備通訊,并與人類實(shí)現(xiàn)交互。給出的建議能夠幫助用戶更加直觀地完成任務(wù),但是這種集成技術(shù)的后果將會(huì)很難預(yù)測(cè)。使用環(huán)境智能和多種人工智能技術(shù)的組合能夠?qū)⑦@種技術(shù)發(fā)揮到極致。
創(chuàng)建更智能的傳感器系統(tǒng)
可以采用人工智能對(duì)傳感器系統(tǒng)進(jìn)行優(yōu)化。人工智能作為計(jì)算機(jī)科學(xué)的一個(gè)分支出現(xiàn)于20世紀(jì)50年代,它繁衍出了很多功能強(qiáng)大的工具,在傳感器系統(tǒng)中具有巨大作用,能夠自動(dòng)解決那些原本需要人類智能才能夠解決的問(wèn)題。
雖然人工智能進(jìn)入工業(yè)領(lǐng)域的進(jìn)程較為緩慢,但是它必將帶來(lái)靈活性、可重新配置能力和可靠性方面的進(jìn)步。全新的系統(tǒng)設(shè)備在越來(lái)越多的任務(wù)中表現(xiàn)出超過(guò)人類的性能。隨著它們與人類越來(lái)越緊密,我們將人類大腦與計(jì)算機(jī)能力結(jié)合起來(lái),實(shí)現(xiàn)商討、分析、推論、通訊和發(fā)明。
人工智能結(jié)合了多種先進(jìn)技術(shù),賦予了機(jī)器學(xué)習(xí)、采納、決策的能力,給予他們?nèi)碌墓δ?。這一成就依賴于神經(jīng)網(wǎng)絡(luò)、專家系統(tǒng)、自組織系統(tǒng)、模糊邏輯和遺傳算法等技術(shù),人工智能技術(shù)將其應(yīng)用領(lǐng)域擴(kuò)展到了很多其他領(lǐng)域,其中一些領(lǐng)域需要對(duì)傳感器信息進(jìn)行解析和處理,例如裝配、生物傳感器、建筑建模、計(jì)算機(jī)視覺(jué)、切割工具診斷、環(huán)境工程、力值傳感、健康監(jiān)控、人機(jī)交互、網(wǎng)絡(luò)應(yīng)用、激光銑削、維護(hù)和檢查、動(dòng)力輔助、機(jī)器人、傳感器網(wǎng)絡(luò)和遙控作業(yè)等等。
這些人工智能方面的發(fā)展被引入到了更加復(fù)雜的傳感器系統(tǒng)中。點(diǎn)擊鼠標(biāo)、輕敲開(kāi)關(guān)或者大腦的思考都會(huì)將任何傳感器數(shù)據(jù)轉(zhuǎn)化為信息并發(fā)送給你。近期此項(xiàng)研究已經(jīng)有所斬獲, 在如下七個(gè)領(lǐng)域中人工智能可以幫助傳感器系統(tǒng)。
1、基于知識(shí)的系統(tǒng)
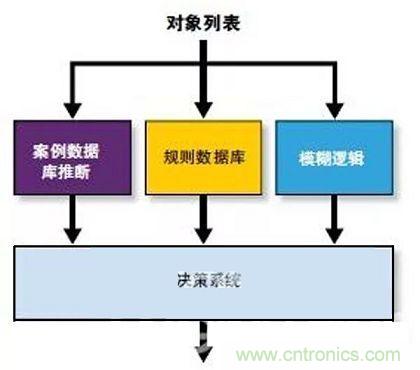
基于知識(shí)的系統(tǒng)也被稱為專家系統(tǒng),它是一種計(jì)算機(jī)應(yīng)用程序,整合了大量與某一領(lǐng)域相關(guān)聯(lián)的問(wèn)題解決方案。
專家系統(tǒng)通常有兩個(gè)組成部分,知識(shí)數(shù)據(jù)庫(kù)和推斷機(jī)制。知識(shí)數(shù)據(jù)庫(kù)以“如果-那么”的形式表述了這個(gè)領(lǐng)域內(nèi)的各種知識(shí),加上各種事實(shí)陳述、框架、對(duì)象和案例。推斷機(jī)制對(duì)存儲(chǔ)的知識(shí)進(jìn)行操作,產(chǎn)生針對(duì)問(wèn)題的解決方案。知識(shí)操作方法包含繼承和約束條件(在基于框架和面向?qū)ο蟮膶<蚁到y(tǒng))、檢索并采納案例(案例系統(tǒng))和應(yīng)用推斷規(guī)則(規(guī)則系統(tǒng)),具體取決于某些控制程序(前向或反向鏈接)和搜索策略(深度優(yōu)先或者廣度優(yōu)先)。
基于規(guī)則的系統(tǒng)將系統(tǒng)的知識(shí)描述為“如果-那么-否則”的形式。特殊的知識(shí)可以用于據(jù)側(cè)。這些系統(tǒng)善于以人類稔熟的形式呈現(xiàn)知識(shí)并作出決策。
由于使用嚴(yán)格的規(guī)則限制,它們并不擅長(zhǎng)于應(yīng)對(duì)不確定的任務(wù)和不精確的場(chǎng)景。典型的規(guī)則系統(tǒng)具有四個(gè)組成部分:規(guī)則列表或者規(guī)則數(shù)據(jù)庫(kù)(知識(shí)數(shù)據(jù)庫(kù)的一種特殊形式)、推斷引擎或者解析器(根據(jù)輸入和規(guī)則數(shù)據(jù)庫(kù)推斷信息或者采取行動(dòng))、臨時(shí)工作存儲(chǔ)器、用戶接口或者其他與外部世界的互通方法,將輸入和輸出信號(hào)接收進(jìn)來(lái)和發(fā)送出去。
基于案例推理方法是基于過(guò)往問(wèn)題的經(jīng)驗(yàn)解決現(xiàn)有問(wèn)題。這種解決方案被存儲(chǔ)于數(shù)據(jù)庫(kù)之中,作為人類專家的經(jīng)驗(yàn)總結(jié)。當(dāng)系統(tǒng)發(fā)生了前所未有的問(wèn)題,它會(huì)將問(wèn)題與過(guò)往問(wèn)題對(duì)比,找到一個(gè)與現(xiàn)有問(wèn)題最為相近的案例。然后按照過(guò)往的解決方案解決問(wèn)題,并按照成功和失敗與否更新數(shù)據(jù)庫(kù)?;诎咐评硐到y(tǒng)通常被認(rèn)為是規(guī)則系統(tǒng)的一種擴(kuò)展,他們善于以人類稔熟的形式呈現(xiàn)知識(shí),具有從過(guò)往案例學(xué)習(xí)并產(chǎn)生新案例的能力。
2、基于案例推理
基于案例推理針對(duì)計(jì)算機(jī)應(yīng)用形成了四個(gè)步驟:
1、檢索:給出目標(biāo)問(wèn)題,從內(nèi)存檢索相關(guān)案例以解決這個(gè)問(wèn)題。案例包括問(wèn)題、解決方案以及關(guān)于這個(gè)解決方案是如何得到的注釋。
2、重用:將解決方案從過(guò)往案例映射到目標(biāo)問(wèn)題上。這一過(guò)程包括對(duì)新場(chǎng)景適應(yīng)性變更。
3、修改:在將解決方案從過(guò)往案例映射到目標(biāo)場(chǎng)景之后,測(cè)試新的解決方案在真實(shí)世界(或者仿真場(chǎng)景)中是否奏效,如果必要,進(jìn)行修改。
4、保留:如果解決方案成功地解決了目標(biāo)問(wèn)題,那么將解決方案作為全新案例存儲(chǔ)于內(nèi)存中。
這一方法的爭(zhēng)論點(diǎn)在于它采納了一些未經(jīng)證實(shí)的證據(jù)作為主要作業(yè)準(zhǔn)則。沒(méi)有統(tǒng)計(jì)相關(guān)數(shù)據(jù)作為支撐,很難確保結(jié)論的準(zhǔn)確性。所有根據(jù)少量數(shù)據(jù)做出的推理都被認(rèn)為是未經(jīng)證實(shí)的證據(jù)。
基于案例推理這一概念的宗旨就是將過(guò)往問(wèn)題的解決方案應(yīng)用在當(dāng)前問(wèn)題上。這種解決方案被存儲(chǔ)于數(shù)據(jù)庫(kù)之中,作為人類專家的經(jīng)驗(yàn)總結(jié)。當(dāng)系統(tǒng)發(fā)生了前所未有的問(wèn)題,它會(huì)將問(wèn)題與過(guò)往問(wèn)題對(duì)比,找到一個(gè)與現(xiàn)有問(wèn)題最為相近的案例。然后按照過(guò)往的解決方案解決問(wèn)題,并按照成功和失敗與否更新數(shù)據(jù)庫(kù)。
基于案例推理系統(tǒng)通常被認(rèn)為是規(guī)則系統(tǒng)的擴(kuò)展。和規(guī)則系統(tǒng)類似,基于案例推理系統(tǒng)善于以人類稔熟的方式呈現(xiàn)知識(shí),不但如此,基于案例推理系統(tǒng)還具有從過(guò)往案例學(xué)習(xí)并產(chǎn)生新案例的能力。圖1所示為基于案例推理系統(tǒng)。
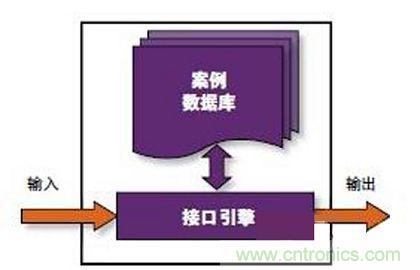
圖示1是基于案例推理系統(tǒng),和基于規(guī)則的系統(tǒng)一樣,基于案例推理系統(tǒng)的擅長(zhǎng)之處在于以人類稔熟的方式呈現(xiàn)信息;同時(shí),基于案例推理系統(tǒng)也具有從過(guò)去案例學(xué)習(xí)進(jìn)而創(chuàng)建新增案例的能力。
很多專家系統(tǒng)再開(kāi)發(fā)時(shí)都采用了一種被稱為“殼”的程序,它是一種配備了完整的推斷和知識(shí)存儲(chǔ)設(shè)備但是并不具備相關(guān)領(lǐng)域內(nèi)知識(shí)的專家系統(tǒng)。一些復(fù)雜的專家系統(tǒng)的構(gòu)建依賴于“開(kāi)發(fā)環(huán)境”,后者比殼的應(yīng)用更加靈活,為用戶提供了構(gòu)建自定義判斷和知識(shí)呈現(xiàn)方法的機(jī)會(huì)。
專家系統(tǒng)恐怕是這些技術(shù)中最為成熟的一種,有很多商業(yè)殼系統(tǒng)和開(kāi)發(fā)工具可供使用。一旦某一領(lǐng)域內(nèi)的知識(shí)被導(dǎo)入了專家系統(tǒng),構(gòu)建整個(gè)系統(tǒng)的過(guò)程就相對(duì)簡(jiǎn)單了。由于專家系統(tǒng)便于使用,所以應(yīng)用廣泛。在傳感器系統(tǒng)中,有很多應(yīng)用領(lǐng)域,包括選擇傳感器輸入、解析信號(hào)、狀態(tài)監(jiān)控、故障診斷、機(jī)器和過(guò)程控制、機(jī)器設(shè)計(jì)、過(guò)程規(guī)劃、生產(chǎn)規(guī)劃和系統(tǒng)配置。專家系統(tǒng)的應(yīng)用還包括裝配、自動(dòng)編程、復(fù)雜智能車輛的控制、檢查規(guī)劃、預(yù)測(cè)危險(xiǎn)、選擇工具和加工策略、工序規(guī)劃和工廠擴(kuò)建的控制。
3、模糊邏輯
普通規(guī)則專家系統(tǒng)有一個(gè)劣勢(shì),就是它無(wú)法應(yīng)對(duì)超出知識(shí)數(shù)據(jù)庫(kù)范圍的情況。當(dāng)這種情況出現(xiàn)時(shí),這些規(guī)則系統(tǒng)無(wú)法給出結(jié)果。這些情況發(fā)生時(shí)系統(tǒng)就會(huì)“當(dāng)機(jī)”,而不似人類專家在面對(duì)全新問(wèn)題的時(shí)候表現(xiàn)出來(lái)的是性能降低。
模糊邏輯的使用,引入了人類判斷所具有的定型判斷和不精確的特性,可以提升專家系統(tǒng)的適應(yīng)性。模糊邏輯將變量值變?yōu)橐环N語(yǔ)言上的描述,這些描述的含義就是模糊集合,而判斷正是依據(jù)這些表述所做出。
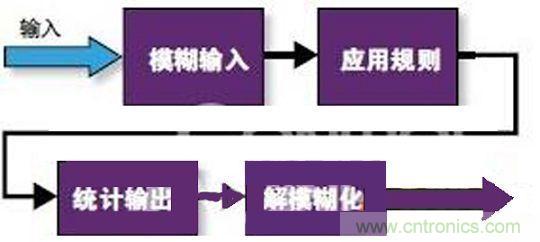
模糊專家系統(tǒng)使用模糊邏輯來(lái)應(yīng)對(duì)不完全數(shù)據(jù)或者被部分損壞的數(shù)據(jù)所帶來(lái)的不確定性。這種技術(shù)使用模糊集合的數(shù)學(xué)理論來(lái)仿真人類判斷的過(guò)程。人類可以很輕松地在決策過(guò)程中應(yīng)對(duì)語(yǔ)意不明的情況(灰色地帶),而機(jī)器認(rèn)為這很難。圖2所示為模糊邏輯控制器的架構(gòu)。
圖2所示為模糊邏輯控制器的架構(gòu)。
模糊邏輯有在傳感器系統(tǒng)中有很多應(yīng)用,因?yàn)檫@一范疇的知識(shí)并不精確。模糊邏輯非常適用于那些在結(jié)構(gòu)和對(duì)象無(wú)法精確匹配的領(lǐng)域、解析度受限的場(chǎng)合、數(shù)字重構(gòu)方法和圖像處理領(lǐng)域。在結(jié)構(gòu)對(duì)象識(shí)別領(lǐng)域和場(chǎng)景解析領(lǐng)域都有模糊集合的應(yīng)用。模糊專家系統(tǒng)適用于要求處理不確定性和不精確性的場(chǎng)合。它們不具備學(xué)習(xí)的能力,因?yàn)橄到y(tǒng)的關(guān)鍵參數(shù)都已經(jīng)預(yù)設(shè)好了,無(wú)法改變。
模糊邏輯在協(xié)同作業(yè)機(jī)器人領(lǐng)域、汽車機(jī)器人、感知預(yù)測(cè)、供應(yīng)鏈管理和焊接領(lǐng)域獲得了成功。
4、自動(dòng)知識(shí)獲取
收集某一領(lǐng)域內(nèi)的知識(shí)以構(gòu)建知識(shí)數(shù)據(jù)庫(kù)是非常復(fù)雜且耗時(shí)的,它往往是搭建專家系統(tǒng)的瓶頸所在。自動(dòng)知識(shí)收集技術(shù)被開(kāi)發(fā)出來(lái)以解決這一問(wèn)題。這種學(xué)習(xí)程序通常要求采用多個(gè)案例作為學(xué)習(xí)的輸入。每一個(gè)案例都具有多種屬性參數(shù),并按類型歸類。一種方法就是采用“分治策略”,根據(jù)某一策略對(duì)各種屬性進(jìn)行篩選,將原有的案例集合劃分為子集合,然后歸納學(xué)習(xí)程序建立決策樹(shù)并將給定的案例集合正確分類。決策樹(shù)能夠表述從集合中的特定案例產(chǎn)生出什么知識(shí)。這一方法還可以后續(xù)應(yīng)用于處理那些沒(méi)有被案例集合覆蓋的情況。
另一種方法被稱為“覆蓋法”,歸納學(xué)習(xí)程序的目標(biāo)是找到一組被某一類型的案例所共同持有的屬性,并將這一共同屬性作為“如果”的部分,將類型做為“然后”的部分。程序?qū)⒓现蟹弦?guī)則的案例移除直至沒(méi)有共同屬性。
還有一種使用邏輯程序代替命題邏輯的方法就是對(duì)案例進(jìn)行描述然后表述全新的概念。這種方法使用了更加強(qiáng)大的預(yù)測(cè)邏輯來(lái)描述訓(xùn)練案例和背景知識(shí),然后表述全新概念。預(yù)測(cè)邏輯允許使用不同型式的訓(xùn)練案例和背景知識(shí),它允許歸納過(guò)程的結(jié)果(歸納概念)以帶有變量的一階子句的形式描述,而不僅限于由屬性-值對(duì)組成的零階命題子句。這種系統(tǒng)主要有兩種類型,第一種是由上自下的歸納/總結(jié)方法,第二種是反向解析原理。
已經(jīng)出現(xiàn)了不少的學(xué)習(xí)程序,例如ID3,它是一種分治策略程序;AQ程序采用了覆蓋法;FOIL程序是采用了歸納/總結(jié)方法的ILP系統(tǒng);GOLEM程序是采用反向解析方法的ILP系統(tǒng)。雖然大多數(shù)程序產(chǎn)生的都是明確的決策規(guī)則,但是也有一些算法能夠產(chǎn)生模糊規(guī)則。要求以嚴(yán)格的格式提供案例集合(明確的屬性和明確的分類)在傳感器系統(tǒng)和傳感器網(wǎng)絡(luò)中很容易滿足,因此自動(dòng)學(xué)習(xí)技術(shù)在傳感器系統(tǒng)中應(yīng)用頗為廣泛。這種類型的學(xué)習(xí)適合于那些屬性是以離散的或者符號(hào)的形式所表示,而并非適用于具有連續(xù)屬性值的傳感器系統(tǒng)案例。一些推斷學(xué)習(xí)應(yīng)用的例子包括激光切割、礦石檢測(cè)和機(jī)器人應(yīng)用。
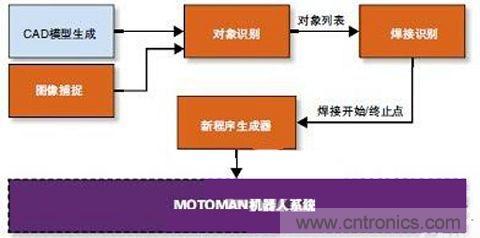
圖3所示為一個(gè)虛擬系統(tǒng)流程圖,顯示了系統(tǒng)如何從圖像傳感器收集數(shù)據(jù)。視覺(jué)數(shù)據(jù)和CAD模型數(shù)據(jù)被搭配使用,用來(lái)確定對(duì)象列表,對(duì)象列表隨后被發(fā)送給焊接識(shí)別模塊,然后采用人工智能技術(shù)明確焊接要求。
5、神經(jīng)網(wǎng)絡(luò)
神經(jīng)網(wǎng)絡(luò)也可以從案例中提取領(lǐng)域知識(shí),它們提取的領(lǐng)域知識(shí)并非以表征的方式描述,例如規(guī)則或者決策樹(shù),而且它們可以同時(shí)應(yīng)對(duì)連續(xù)數(shù)據(jù)和離散數(shù)據(jù)。它們也具有與模糊專家系統(tǒng)類似的不錯(cuò)的歸納能力。神經(jīng)網(wǎng)絡(luò)是大腦的計(jì)算機(jī)模型,神經(jīng)網(wǎng)絡(luò)模型通常假設(shè)計(jì)算過(guò)程可以使用多個(gè)簡(jiǎn)單的被稱為神經(jīng)元的單元所描述,神經(jīng)元可以相互連接并行作業(yè)。
最常見(jiàn)的神經(jīng)網(wǎng)絡(luò)是多層感知器,它是一種前饋網(wǎng)絡(luò):所有信號(hào)以一種方向傳輸,從輸入到輸出。前饋網(wǎng)絡(luò)能夠在輸入空間和輸出空間進(jìn)行靜態(tài)映射:在某一時(shí)刻的輸出僅與這一時(shí)刻的輸入構(gòu)成函數(shù)關(guān)系。周期型網(wǎng)絡(luò)中,某些神經(jīng)元的輸出反饋會(huì)同一個(gè)神經(jīng)元或者反饋回之前層級(jí)的神經(jīng)元,可以認(rèn)為具有動(dòng)態(tài)內(nèi)存:這種網(wǎng)絡(luò)在某一時(shí)刻的輸出受當(dāng)前輸入和之前輸入和輸出的影響。
不顯性表述的“知識(shí)”通過(guò)對(duì)神經(jīng)網(wǎng)絡(luò)進(jìn)行訓(xùn)練而內(nèi)置于神經(jīng)網(wǎng)絡(luò)內(nèi)。某些神經(jīng)網(wǎng)絡(luò)能夠使用預(yù)先定義的特定輸入模式進(jìn)行訓(xùn)練,進(jìn)而產(chǎn)生預(yù)期的輸出模式。實(shí)際輸出和預(yù)期輸出之間的差異用來(lái)對(duì)神經(jīng)元之間連接的強(qiáng)度和權(quán)值進(jìn)行修正。這種方法被稱為監(jiān)督訓(xùn)練。在多層感知器中,監(jiān)督訓(xùn)練的反向傳播算法通常用來(lái)傳播來(lái)自于輸出神經(jīng)元的誤差,然后計(jì)算出隱含層神經(jīng)元的修正權(quán)值。
人工神經(jīng)網(wǎng)絡(luò)通常具有輸入和輸出,在輸入和輸出之間的隱藏層完成處理任務(wù)。輸入是獨(dú)立的變量,而輸出是相互關(guān)聯(lián)的。人工神經(jīng)網(wǎng)絡(luò)是具有可配置內(nèi)部參數(shù)的靈活的數(shù)學(xué)方程。為了精確地展現(xiàn)復(fù)雜的關(guān)系,通過(guò)訓(xùn)練算法來(lái)調(diào)整這些參數(shù)。在簡(jiǎn)單訓(xùn)練模式下,輸入案例和相應(yīng)的預(yù)期輸出同時(shí)展現(xiàn)給網(wǎng)絡(luò),通過(guò)盡可能多的案例進(jìn)行重復(fù)進(jìn)行自調(diào)整過(guò)程。一旦訓(xùn)練結(jié)束,人工神經(jīng)網(wǎng)絡(luò)就能夠接受全新的輸入,預(yù)測(cè)正確的輸出。
為了產(chǎn)生輸出,網(wǎng)絡(luò)只需要按方程計(jì)算即可。唯一的假設(shè)就是在輸入數(shù)據(jù)和輸出數(shù)據(jù)之間存在某種連續(xù)的函數(shù)關(guān)系。神經(jīng)網(wǎng)絡(luò)適用于映射設(shè)備、模式歸類或者模式補(bǔ)全(自動(dòng)聯(lián)想內(nèi)容尋址內(nèi)存和模式關(guān)聯(lián)器)。
圖4所示為傳感器系統(tǒng)針對(duì)焊接識(shí)別模塊做出焊接要求建議。這一模塊評(píng)估建議并決定最佳的焊接軌跡。建議隨后被發(fā)送給實(shí)際的機(jī)器人程序生成器。
近期的應(yīng)用包括特征識(shí)別、熱交換器、焊點(diǎn)檢查、點(diǎn)焊參數(shù)優(yōu)化、電力、觸覺(jué)顯示和車輛傳感系統(tǒng)。
6、遺傳算法
遺傳算法是一種隨機(jī)最優(yōu)化過(guò)程,其靈感來(lái)自于自然演化。遺傳算法能夠在復(fù)雜的多向搜索中產(chǎn)生全局最優(yōu)解決方案,無(wú)需針對(duì)問(wèn)題本身的特定知識(shí)。遺傳算法已經(jīng)在傳感器系統(tǒng)中找到了用武之地,包括復(fù)雜組合或者多參數(shù)優(yōu)化,包括裝配、裝配流水線平衡、故障診斷、健康監(jiān)控和動(dòng)力方向盤。
7、環(huán)境智能
環(huán)境智能在最近幾十年獲得了長(zhǎng)足的發(fā)展,見(jiàn)證了人類在數(shù)字控制環(huán)境中便利的工作過(guò)程,電子設(shè)備可以預(yù)測(cè)他們的行為并做出響應(yīng)。環(huán)境智能的概念用于實(shí)現(xiàn)人類和傳感器系統(tǒng)之間的無(wú)縫匹配,滿足實(shí)際的預(yù)期的需求。工業(yè)領(lǐng)域內(nèi)的應(yīng)用尚有局限,但是新型的更加智能且具有更高交互性的系統(tǒng)已經(jīng)處在研究階段。
擴(kuò)展系統(tǒng)
人工智能能夠增加通訊的有效性、減少故障、最小化誤差并延長(zhǎng)傳感器的壽命。在過(guò)去40年間,人工智能技術(shù)帶來(lái)了一系列功能強(qiáng)大的工具,如前文所列。這些工具在傳感器系統(tǒng)中的應(yīng)用越來(lái)越廣泛。合理地采用新型人工智能技術(shù)方法將會(huì)有助于構(gòu)建更加具有競(jìng)爭(zhēng)力的傳感器系統(tǒng)。由于工程師對(duì)這種技術(shù)的陌生以及使用這些工具仍舊存在的技術(shù)壁壘,也許還需要另一個(gè)10年工程師們才能夠接納它們。然而,這一領(lǐng)域的研究不會(huì)停歇,很多新型傳感器應(yīng)用正在出現(xiàn),這些技術(shù)的搭配使用將會(huì)發(fā)揮出更大的作用。
從智能工廠的應(yīng)用,對(duì)電網(wǎng)、空氣、公路等監(jiān)測(cè)網(wǎng)絡(luò)的實(shí)施,傳感器的發(fā)展領(lǐng)域一直在不斷的擴(kuò)大。計(jì)劃落地后,現(xiàn)在又提出人工智能飛進(jìn)千家萬(wàn)戶,家用產(chǎn)品會(huì)變得越來(lái)越智能,萬(wàn)物互聯(lián)時(shí)代正在飛速的發(fā)展,未來(lái)人們的生活可能方方面面都離不開(kāi)最基礎(chǔ)的傳感器。這對(duì)于傳感器行業(yè)來(lái)說(shuō),是莫大的機(jī)遇。
機(jī)遇往往伴隨著挑戰(zhàn),傳感器行業(yè)也面臨著很多問(wèn)題,如何研發(fā)出符合市場(chǎng)潮流和計(jì)劃中要求的傳感器?如何讓傳感器在同類傳感器中脫穎而出?只有跟隨時(shí)代發(fā)展的潮流,才能有正確的方向,掌握了核心技術(shù),才能立于不敗之地,對(duì)于傳感器行業(yè)來(lái)說(shuō),只有抓住這個(gè)機(jī)遇,注重研發(fā)和市場(chǎng)需求,才能更上一層樓。
本文轉(zhuǎn)載自傳感器技術(shù)。
推薦閱讀:

