
【導(dǎo)讀】MAV由于體積和負載能力極為有限,因此,減小和減輕飛控導(dǎo)航系統(tǒng)的體積及重量,就顯得尤為重要。本文基于MEMS加速度傳感器,設(shè)計一種雙軸傾角計,該裝置精度高、重量輕,可滿足MAV的姿態(tài)角測量要求,也可用于其他需要體積小、重量輕的傾角測量設(shè)備上。
MEMS加速度傳感器
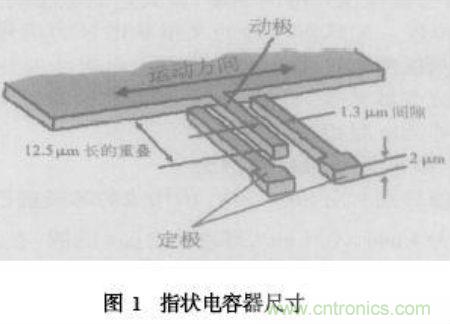
ADXL202是最新的、低重力加速度雙軸表面微機械加工的加速度計,以模擬量和脈寬調(diào)制數(shù)字量2種方式輸出,并具有極低的功耗和噪音。表面微機械加工使加速度傳感器、信號處理電路高度集成于一個硅片上。和所有加速度計一樣,傳感器單元是差動電容器,其輸出與加速度成比例。加速度計的性能依賴于傳感器的結(jié)構(gòu)設(shè)計。差動電容是由懸臂梁構(gòu)成,而懸臂梁是由很多相間分布的指狀電容電極副構(gòu)成,一副指狀電容電極可簡化為圖1所示的結(jié)構(gòu)。每個指狀電極的電容正比例于固定電極和移動電極之間的重疊面積以及移動電極的位移。顯然,這些都是很小的電容器,并且,為了降低噪聲和提高分辨力,實際上需要盡可能大的差動電容。
懸臂梁的運動是由支撐它的多晶硅彈簧控制。這些彈簧和懸臂梁的質(zhì)量遵守牛頓第二定律:質(zhì)量為m 的物體,因受力F而產(chǎn)生加速度a,則F =m a。而彈簧的形變與所受力的大小成比例,即F = kx,所以
x = (m / k) a ,
式中 x為位移, m; m 為質(zhì)量, kg; a為加速度, m / s2 ; k為彈簧剛度系數(shù), N /m。
因此,僅有支撐彈簧的剛度和懸臂梁的質(zhì)量2個參數(shù)是可控的。減小彈簧系數(shù)似乎是提高懸臂梁靈敏度的一種容易方法,但懸臂梁的共振頻率正比例于彈簧系數(shù),所以, 減小彈簧系數(shù)導(dǎo)致懸臂梁共振頻率降低,而加速度計必須工作在共振頻率之下。此外,增大彈簧系數(shù)使懸臂梁更堅固。所以,如果保持盡可能高的彈簧系數(shù),只有懸臂梁的質(zhì)量參數(shù)是可變化的。通常,增大質(zhì)量意味著增大傳感器的面積,從而使懸臂梁增大。在ADXL202中,設(shè)計出一個新穎的懸臂梁結(jié)構(gòu)。構(gòu)成X軸和Y軸可變電容的指狀電極沿著一個正方形四周的懸臂梁集成,從而使整個傳感器的面積減小,而且,共用的大質(zhì)量的懸臂梁提高了ADXL202的分辨力。位于懸臂梁四角的彈簧懸掛系統(tǒng)用以使X 軸和Y軸的靈敏度耦合減小到最小。
傾角測量原理
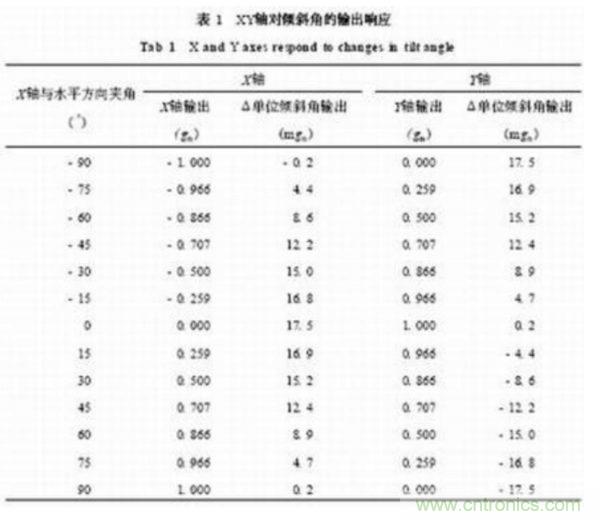
ADXL202用于傾角測量是最典型的應(yīng)用之一,它以重力作為輸入矢量來決定物體在空間的方向。當(dāng)重力與其敏感軸垂直時,它對傾斜最敏感,在該方位上其對傾角的靈敏度最高。當(dāng)敏感軸與重力平行時,每傾斜1 °所引起輸出加速度的變化被忽略。當(dāng)加速度計敏感軸與重力垂直時,每傾斜1 °所引起輸出加速度的變化約為17. 5mgn ,但在45°時,每傾斜1 °所引起輸出加速度的變化僅為12. 5mgn ,而且,分辨力降低。表1為X, Y軸在鉛垂面內(nèi)傾斜±90 °時,X, Y 軸的輸出。
當(dāng)該加速度計的X, Y軸都與重力方向垂直時,可作為具有滾轉(zhuǎn)角和俯仰角的雙軸傾角傳感器。一旦加速度計的輸出信號被轉(zhuǎn)化為一個加速度, 該加速度將位于- 1 gn 和+ 1 gn 之間。則傾斜角以度表示可按下式計算
θ= arcsin (AX / gn )
γ= arcsin (AY / gn ) ,
式中 θ,γ分別為俯仰角和滾轉(zhuǎn)角, ( °) ; AX , AY 分別為加速度傳感器X軸和Y軸輸出, gn。
傾角測量電路
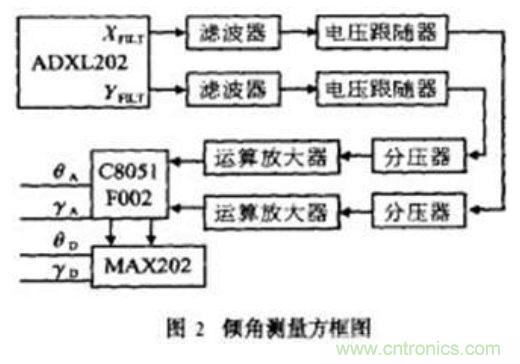
測量電路方框圖如圖2所示, ADXL202輸出的電壓首先經(jīng)低通濾波器慮波,再經(jīng)電壓跟隨器進行阻抗匹配。當(dāng)X, Y軸均處于水平位置時,兩路輸出電壓經(jīng)分壓器分壓后為1. 2V,當(dāng)X, Y軸分別從- 90°轉(zhuǎn)到+ 90°時,經(jīng)過放大后的電壓從0V變到+ 2. 4V,以適應(yīng)單片機C8051F002的A /D轉(zhuǎn)換器的需要,然后,用單片機進行線性化處理和溫度補償,分別以模擬量從D /A轉(zhuǎn)換器DAC0,DAC1輸出,并以θA 表示俯仰角的模擬量輸出,γB 表示滾轉(zhuǎn)角的模擬量輸出;同時,俯仰角和滾轉(zhuǎn)角轉(zhuǎn)換為數(shù)字量從串行口RS232以數(shù)字量度輸出,分別為θD 和γD。
實驗結(jié)果
在傾角計線性化和溫度補償后,進行了量程范圍內(nèi)的測量,所用設(shè)備為三坐標(biāo)測量儀工作臺作為水平基準(zhǔn),200mm正弦規(guī)及千分塊規(guī)作為角度發(fā)生器產(chǎn)生基準(zhǔn)角度,通過串口連接傾角計于計算機顯示傾角計所測角度。由于三坐標(biāo)測量儀工作臺的水平度及正弦規(guī)和千分塊規(guī)所產(chǎn)生角度精度足夠高,認為所產(chǎn)生的角度誤差極小,可作為角度的期望值。測量結(jié)果如表2所示。

從表2可以算出:傾角最大誤差為- 0. 26°~0. 25°,而平均角度誤差為±0. 135°, 分別為滿量程的0. 57 %和0. 30 %。

結(jié) 論
本文利用MEMS雙軸加速度傳感器設(shè)計的雙軸傾角計,體積小、重量輕(約10 g) ,線性化及溫度補償后的測量結(jié)果表明: 在測量范圍±45°內(nèi), 最大誤差為滿量程的0. 57 % ,平均誤差為滿量程的0. 30 %。
該傾角計很好地滿足了MAV姿態(tài)控制時滾轉(zhuǎn)角、俯仰角測量要求。同時,該傾角計也可以用于要求體積小、重量輕的其他測量設(shè)備上。
推薦閱讀:


