
【導(dǎo)讀】本文闡述的雖是北斗/GPS 雙模射頻接收模組設(shè)計, 但只需通過SPI 總線進行相關(guān)寄存器配置, 即可實現(xiàn)GPS_L1 、GLONASS_L1 、Galileo_E1 、BDII_B1 任意兩兩組合的雙模射頻接收模組的應(yīng)用, 這也正是本文的實用創(chuàng)新之處。
當(dāng)前,北斗導(dǎo)航系統(tǒng)在大眾層級中的普及應(yīng)用有一定難度, 相對于GPS 的市場占有率,走北斗/GPS 雙模兼容之路不失為一種策略。為此本文提出了北斗/GPS 雙模兼容射頻接收模組的設(shè)計方案, 并詳述了具體的設(shè)計經(jīng)驗, 方案可以滿足用戶對高定位精度的需求[ 1-2]。本文采用雙MAX2769 芯片的設(shè)計方案, 芯片的工作性能比普通國產(chǎn)多模RFIC 好, 成本也遠小于國產(chǎn)的相關(guān)射頻接收模組。另外本文闡述的雖是北斗/GPS 雙模射頻接收模組設(shè)計, 但只需通過SPI 總線進行相關(guān)寄存器配置, 即可實現(xiàn)GPS_L1 、GLONASS_L1 、Galileo_E1 、BDII_B1 任意兩兩組合的雙模射頻接收模組的應(yīng)用, 這也正是本文的實用創(chuàng)新之處。

1 關(guān)鍵技術(shù)指標(biāo)分析
在密集而復(fù)雜的電磁環(huán)境中, 為實現(xiàn)接收機的高靈敏度和大動態(tài)范圍, 射頻接收模組的設(shè)計中必須認真考慮靈敏度和動態(tài)范圍問題[ 3-4]。
1.1 系統(tǒng)噪聲系數(shù)與靈敏度
不失一般性, 假設(shè)射頻接收模組為一個雙端口網(wǎng)絡(luò)系統(tǒng), 根據(jù)噪聲系數(shù)的定義, 系統(tǒng)的噪聲系數(shù)NF 應(yīng)為:
式中,S 、N 分別表示系統(tǒng)端口的信號和噪聲功率。由于帶電粒子的熱運動會形成熱噪聲, 輸入端口噪聲功率Ni可等效為:
式中,K 為波耳茲曼常數(shù)(1.38×10-23 J/K) ,T 為系統(tǒng)絕對溫度(290 K) ,B 為系統(tǒng)等效帶寬。將式(2) 代入式(1) , 整理得:

其中,(S/N)o ,min為滿足一定誤碼率條件下解調(diào)器所需的最小信噪比,Si (dBm) 表示接收機的靈敏度。從式(3) 可以看出,接收機的帶寬、噪聲系數(shù)NF 和最小信噪比(S/N)o,min均會影響其靈敏度。
本射頻接收模組是一個多級系統(tǒng), 系統(tǒng)的噪聲系數(shù)NFsys定義為:
式中,NFi代表第i 級的噪聲系數(shù),Gi為第i 級的資用功率增益。對于級聯(lián)系統(tǒng)而言,NFsys基本取決于第一級的噪聲系數(shù)和增益, 第一級的增益越高, 后級的噪聲系數(shù)對NFsys的影響就越小。
式(3) 表明, 減小NF 可以提高接收機的靈敏度。因此從整機最佳噪聲系數(shù)設(shè)計的角度出發(fā), 可將射頻接收模組進一步等效為圖1 所示結(jié)構(gòu)。

圖1 射頻接收模組等效結(jié)構(gòu)
分析式(4) 可知, 在滿足設(shè)計要求的條件下, 第一級若采用兩級低噪聲放大器(LNA) 結(jié)構(gòu), 則整機噪聲系數(shù)會提高很多。
1.2 系統(tǒng)增益與動態(tài)范圍
衛(wèi)星導(dǎo)航接口控制文件規(guī)定:
衛(wèi)星發(fā)射的導(dǎo)航信號到達接收機天線輸入口的最小保證電平:GPS_L1 為-130 dBm,BDII_B1 為-133 dBm[5]。實際應(yīng)用中, 天線口的信號強度還與衛(wèi)星的高度、仰角以及接收天線的接收面積和接收機所處的工作環(huán)境有關(guān), 因此接收天線口所接收到的信號強度是一個動態(tài)的變化范圍。另外,由于接收機射頻模組的非線性特性,各級輸出會存在大量的雜散分量,這些雜散分量若是落入工作帶寬內(nèi), 將會影響信號的信噪比。因此,業(yè)內(nèi)定義三階截點來表征這種非線性特性,同時還定義了無雜散動態(tài)范圍(SFDR)用于比較不同接收機的動態(tài)特性[6],SFDR 的表達式為:
式中,MDS 取決于接收機的靈敏度,IIP3 ,sys根據(jù)級聯(lián)系統(tǒng)的三階截點定義,表示為:

其中,n 代表第n 級,Gj為第j 級的增益。可以看出,IIP3,sys取決于級聯(lián)系統(tǒng)中三階截點最低的那一級。若第j 級的增益較大, 則第j+1 級的三階截點對系統(tǒng)三階截點的影響會更大。
接收模組的ADC 特性取決于系統(tǒng)設(shè)計要求, 接收鏈路的總增益依賴于ADC 和天線口熱噪聲功率。因此在指標(biāo)分配時, 要使鏈路具有盡可能低的噪聲系數(shù)和盡可能高的三階截點。
2 射頻模組的具體設(shè)計
2.1 總體框圖
衛(wèi)星導(dǎo)航信號經(jīng)過天線、第一級LNA、第二級LNA、二等分功分器后, 分別進入射頻通道, 各射頻通道對接收到的衛(wèi)星信號進行下變頻、中頻濾波和放大, 最后送到模/數(shù)轉(zhuǎn)換ADC 并輸出數(shù)字中頻信號。模組的總體框圖如圖2 所示。
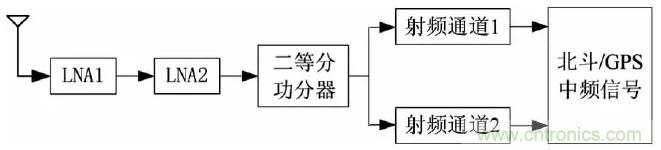
圖2 射頻接收模組總體框圖
2.2 LNA 電路設(shè)計
在設(shè)計LNA 時, 主要考慮噪聲系數(shù)和增益。為了保證接收鏈路具有盡可能低的噪聲系數(shù), 同時防止因增益過高而使放大器工作產(chǎn)生自激, 本模組采用兩級LNA設(shè)計結(jié)構(gòu)。另外, 由于北斗B1/GPS_L1 的載波頻率鄰近,這里將各通道的LNA 級統(tǒng)一處理, 設(shè)計成一個通道。LNA1 采用美信公司的MAX2659 芯片,它是一款專用于導(dǎo)航領(lǐng)域的低噪聲放大器, 封裝尺寸僅為1.5 mm×1.0 mm,在1.5~1.6 GHz 頻段具有高達20.5 dB 的增益, 噪聲系數(shù)低至0.8 dB。LNA2 采用安捷倫公司的MGA85563 芯片, 在1.5~1.6 GHz 頻段的增益達18 dB, 噪聲系數(shù)低至1.6 dB, 三階截點IP3 可調(diào)范圍為12 dBm~17 dBm。雙LNA 結(jié)構(gòu)的應(yīng)用電路如圖3 所示。
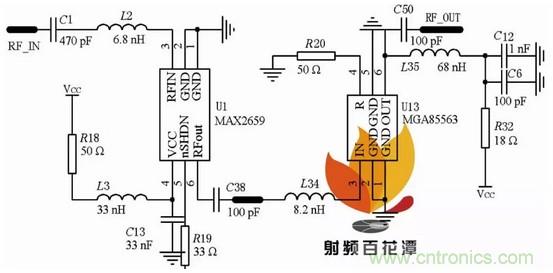
圖3 前級LNA 設(shè)計電路
2.3 射頻電源設(shè)計
射頻接收模組涉及LNA、混頻器、鎖相環(huán)(PLL) 、壓控振蕩器(VCO) 、中頻放大器、ADC 等電路, 這些模擬電路對噪聲十分敏感, 為它們的正常工作提供的直流電源必須在滿足壓差的條件下具備低噪聲、高電源紋波抑制比(PSRR) 和快速瞬態(tài)響應(yīng)特性[7]。LDO (Low DropoutRegulator ) 是一種微功耗的低壓差線性穩(wěn)壓器, 其具有較好的輸出噪聲和較高的電源抑制比, 因此特別適用于射頻電源的設(shè)計。
根據(jù)LDO 的工作原理,LDO 的輸出噪聲受其內(nèi)部設(shè)計和外部旁路、補償電路的影響。其中LDO 的基準(zhǔn)源是其輸出噪聲的主要來源。為降低基準(zhǔn)源的噪聲影響, 必須使用連接基準(zhǔn)源的旁路電容。增大旁路電容能夠減少基準(zhǔn)源的輸出噪聲, 但旁路電容值的增大, 也會導(dǎo)致LDO 的輸出電壓上升速率變慢, 影響射頻模組的正常供電, 使用時需要注意。LDO 的輸出電容值也必須與負載匹配, 這樣既有利于提高電源的快速瞬態(tài)響應(yīng)特性, 又有利于降低LDO 的高頻輸出噪聲。
本文選用TI 的TPS793XX 系列芯片, 它是一款專用于射頻領(lǐng)域的LDO, 在10 kHz 頻率處具有高達70 dB 的PSRR, 輸出噪聲低至32 μVRMS, 響應(yīng)時間為50 μs, 壓差低至112 mV。以GPS 通道為例,其電源電路如圖4 所示。
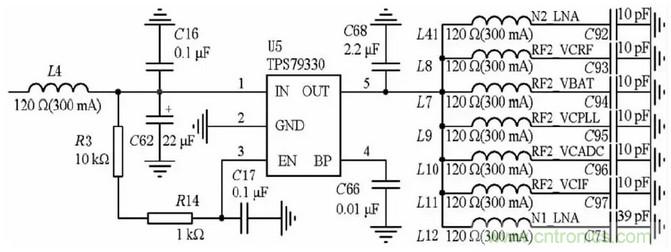
圖4 GPS 通道的電源設(shè)計電路
2.4 參考時鐘晶振電路設(shè)計
本射頻接收模組中ADC 采樣與下變頻器使用的是同一參考時鐘, 時鐘晶振輸出的頻率偏差會傳遞給下變頻器輸出的中頻信號, 此時再使用帶有頻偏的采樣時鐘就會造成數(shù)據(jù)位的移位、偽碼相位偏移、多普勒頻移值估算誤差增大。因此, 保證頻率穩(wěn)定度、減少相位噪聲是晶振電路設(shè)計的關(guān)鍵。本模組選用了0.5 ppm 的TCXO,并經(jīng)SN74LVC1G04 整形輸出。晶振的供電部分為防止電源噪聲和地電位的跳躍, 采用了濾波和去耦電路, 這里使用村田公司BLM15 系列的鐵氧體磁珠, 簡化供電濾波電路的設(shè)計。晶振部分的設(shè)計電路如圖5 所示。
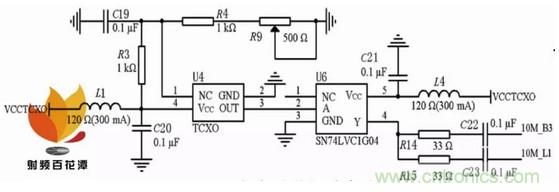
圖5 晶振部分的設(shè)計電路
2.5 底層驅(qū)動設(shè)計
本射頻模組采用兩片美信的MAX2769B 射頻芯片,芯片本身支持GPS_L1、GLONASS_L1、GALIEO_E1、BDII_B1頻段, 片內(nèi)集成LNA、混頻器、鏡像抑制濾波器、PGA、VCO、N 分頻頻率合成器、晶體振蕩器和多位ADC。在設(shè)計時需要根據(jù)導(dǎo)航信號的特性設(shè)置相應(yīng)的配置寄存器。
本文使用Verilog 語言編寫了4 組與導(dǎo)航系統(tǒng)對應(yīng)的驅(qū)動程序。以北斗B1 的驅(qū)動程序為例, 使用ModelSim 對驅(qū)動程序進行仿真, 如圖6 所示。

圖6 北斗B1 驅(qū)動程序的時序仿真
2.6 pcb 設(shè)計
影響射頻接收模組靈敏度的因素除了前述內(nèi)容,pcb 設(shè)計也不容忽視, 如射頻路徑、射頻接地、射頻電源pcb、中頻輸出數(shù)據(jù)線都需要認真考慮。
由于射頻信號的趨膚效應(yīng),射頻路徑及晶振參考時鐘路徑必須滿足3 W 原則, 同時還要匹配到50 Ω。不良的射頻接地也會導(dǎo)致寄生噪聲、不期望的耦合和干擾增加, 設(shè)計時除了正常的接地路徑要滿足最短原則外,還需要關(guān)注各級放大器鏈上的直流供電和直流偏置端口,這些特殊接地端口的阻抗對交流或射頻電流必須接近于零, “ 零” 電容、“ 無窮大” 電感對于這些接地是一種很好的輔助手段。
晶振、電源是射頻模組中的兩大主要干擾源, 電源部分的pcb 設(shè)計除了前述的內(nèi)容, 還要保證完整的參考電源層和地層, 兩者之間的間距應(yīng)盡可能短, 以提高電路板噪聲耦合性能。本模組采用T -G-P -B 板層結(jié)構(gòu); 晶振部分除了要遠離射頻路徑以外, 供電端口要增大供電線寬以降低耦合噪聲。
3 射頻模組的測試分析
3.1 模組的功能指標(biāo)測試
功能指標(biāo)測試涉及電源紋波、噪聲系數(shù)、三階截點和增益, 測試結(jié)果見表1。天線口噪聲功率譜密度的測試結(jié)果如圖7 所示。
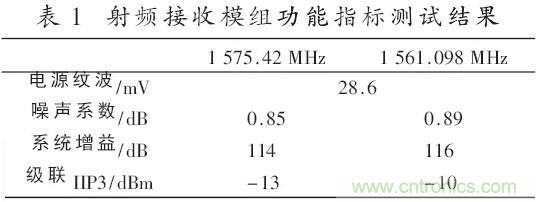

圖7 模組噪聲功率譜密度測試結(jié)果
3.2 模組的應(yīng)用測試
模組的應(yīng)用測試涉及工機與商用合芯星通接收機、泰斗微接收機進行定位性能比較。這里以北斗的B1 信號測試為例, 測試結(jié)果如圖8所示。
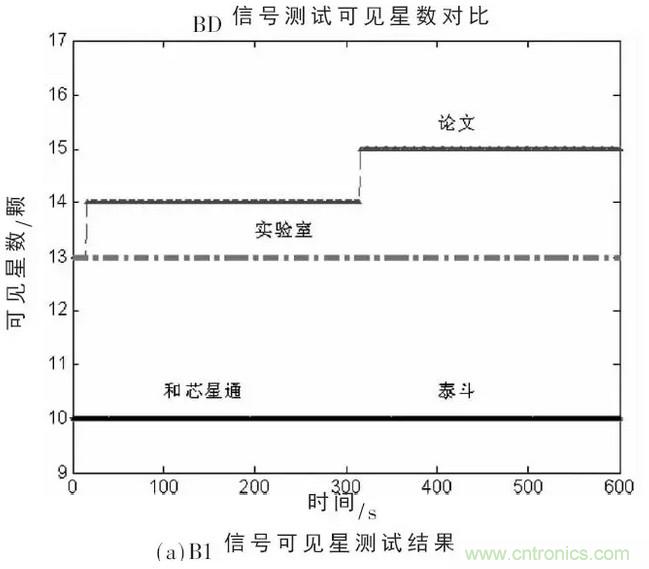
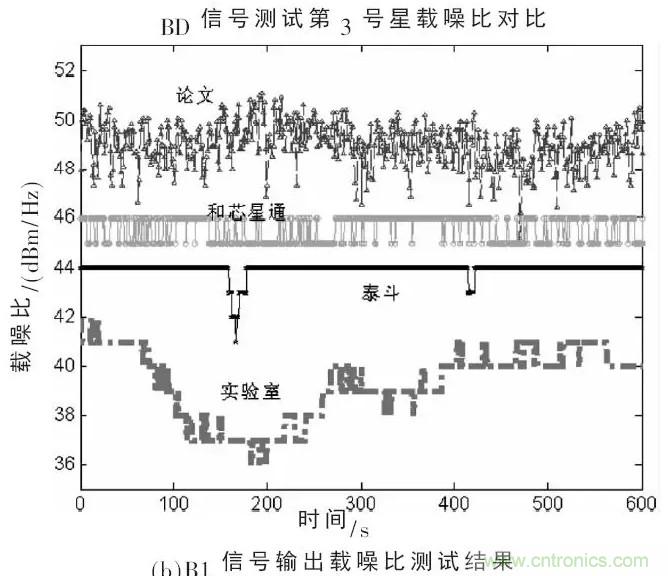
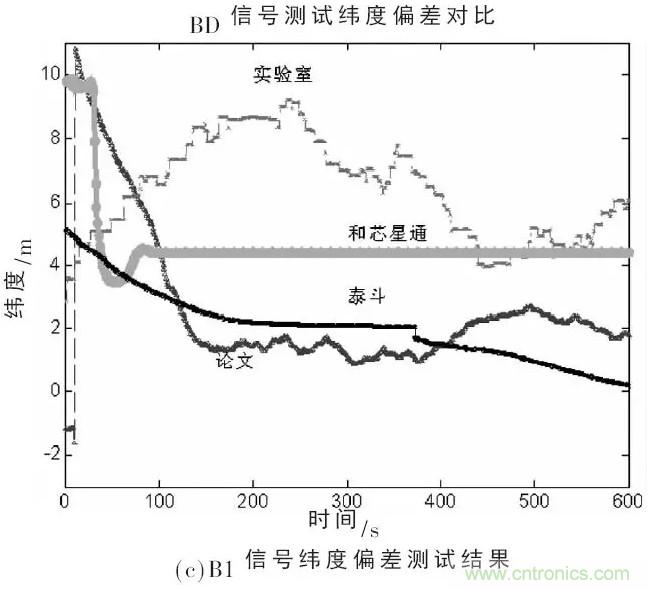
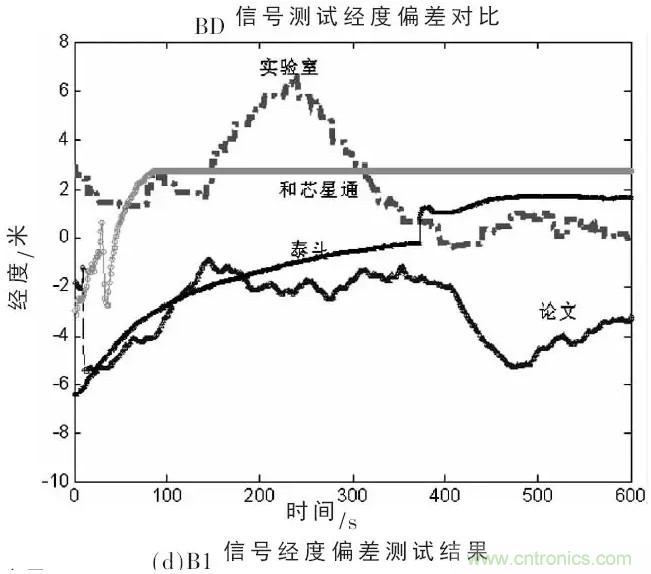
圖8 測試結(jié)果
測試結(jié)果表明, 本文設(shè)計的射頻接收模組捕獲的衛(wèi)星個數(shù)比實驗室商用RX3007 模組多, 輸出的信號載噪比都比其他商用接收機高一些, 定位經(jīng)緯度與商用RX3007 模組差不多, 比其他商用接收機的性能稍好。
雙?;蚨嗄Pl(wèi)星導(dǎo)航接收機可以減少衛(wèi)星導(dǎo)航信號被干擾或遮擋的可能,同時還能減少衛(wèi)星分布的幾何因子提高接收機的定位精度。本文設(shè)計的北斗和GPS雙模兼容射頻接收模組有著廣闊的應(yīng)用前景,同時還有利于當(dāng)前北斗民用市場的推廣及應(yīng)用。本文針對多模導(dǎo)航接收機的應(yīng)用, 提出了射頻接收模組的設(shè)計方案, 詳述了具體的設(shè)計經(jīng)驗,并進行了功能和應(yīng)用性能的測試。測試結(jié)果表明模組性能良好, 工作穩(wěn)定,可直接應(yīng)用于當(dāng)前多模導(dǎo)航接收機的研究中。
本文轉(zhuǎn)載自射頻百花潭微信公眾號,作者:朱常其孫希延等
推薦閱讀:

