
【導(dǎo)讀】相位噪聲指標(biāo)對(duì)于當(dāng)前的射頻微波系統(tǒng)、移動(dòng)通信系統(tǒng)、雷達(dá)系統(tǒng)等電子系統(tǒng)影響非常明顯,將直接影響系統(tǒng)指標(biāo)的優(yōu)劣。該項(xiàng)指標(biāo)對(duì)于系統(tǒng)的研發(fā)、設(shè)計(jì)均具有指導(dǎo)意義。相位噪聲指標(biāo)的測試手段很多,如何能夠精準(zhǔn)的測量該指標(biāo)是射頻微波領(lǐng)域的一項(xiàng)重要任務(wù)。隨著當(dāng)前接收機(jī)相位噪聲指標(biāo)越來越高,相應(yīng)的測試技術(shù)和測試手段也有了很大的進(jìn)步。同時(shí),與相位噪聲測試相關(guān)的其他測試需求也越來越多,如何準(zhǔn)確的進(jìn)行這些指標(biāo)的測試也愈發(fā)重要。
1、引言
隨著電子技術(shù)的發(fā)展,器件的噪聲系數(shù)越來越低,放大器的動(dòng)態(tài)范圍也越來越大,增益也大有提高,使得電路系統(tǒng)的靈敏度和選擇性以及線性度等主要技術(shù)指標(biāo)都得到較好的解決。同時(shí),隨著技術(shù)的不斷提高,對(duì)電路系統(tǒng)又提出了更高的要求,這就要求電路系統(tǒng)必須具有較低的相位噪聲,在現(xiàn)代技術(shù)中,相位噪聲已成為限制電路系統(tǒng)的主要因素。低相位噪聲對(duì)于提高電路系統(tǒng)性能起到重要作用。
相位噪聲好壞對(duì)通訊系統(tǒng)有很大影響,尤其現(xiàn)代通訊系統(tǒng)中狀態(tài)很多,頻道又很密集,并且不斷的變換,所以對(duì)相位噪聲的要求也愈來愈高。如果本振信號(hào)的相位噪聲較差,會(huì)增加通信中的誤碼率,影響載頻跟蹤精度。相位噪聲不好,不僅增加誤碼率、影響載頻跟蹤精度,還影響通信接收機(jī)信道內(nèi)、外性能測量,相位噪聲對(duì)鄰近頻道選擇性有影響。如果要求接收機(jī)選擇性越高,則相位噪聲就必須更好,要求接收機(jī)靈敏度越高,相位噪聲也必須更好。
總之,對(duì)于現(xiàn)代通信的各種接收機(jī),相位噪聲指標(biāo)尤為重要,對(duì)于該指標(biāo)的精準(zhǔn)測試要求也越來越高,相應(yīng)的技術(shù)手段要求也越來越高。
2、相位噪聲基礎(chǔ)
2.1、什么是相位噪聲
相位噪聲是振蕩器在短時(shí)間內(nèi)頻率穩(wěn)定度的度量參數(shù)。它來源于振蕩器輸出信號(hào)由噪聲引起的相位、頻率的變化。頻率穩(wěn)定度分為兩個(gè)方面:長期穩(wěn)定度和短期穩(wěn)定度,其中,短期穩(wěn)定度在時(shí)域內(nèi)用艾倫方差來表示,在頻域內(nèi)用相位噪聲來表示。
2.2、相位噪聲的定義
IEEE standard 1139-1988:以載波的幅度為參考,在偏移一定的頻率下的單邊帶相對(duì)噪聲功率。這個(gè)數(shù)值是指在1Hz的帶寬下的相對(duì)噪聲電平,其單位為dBc/Hz。該定義最早是基于頻譜儀法測試相位噪聲,不區(qū)分調(diào)幅噪聲和調(diào)相噪聲。
IEEE standard 1139-1999:單邊帶相位噪聲L(f)定義為隨機(jī)相位波動(dòng)單邊帶功率譜密度Sφ(f)的一半,其單位為dBc/Hz。其中Sφ(f)為隨機(jī)相位波動(dòng)φ(t)的單邊帶功率譜密度,其物理量綱是rad2/Hz。 該定義基于鑒相器法測量相位噪聲,使載波降頻變換為接近直流,高噪聲下,會(huì)引起L(f)和Sφ(f)之間顯著的差異。
3、CW信號(hào)相位噪聲的測試原理及方法
3.1、頻譜儀測試法
3.1.1、直接頻譜分析(Marker Function)
該方法按照相位噪聲的基本定義,首先測量中心載波的信號(hào)功率,然后測量某一頻偏處噪聲功率,最后做計(jì)算即可得到相位噪聲值。
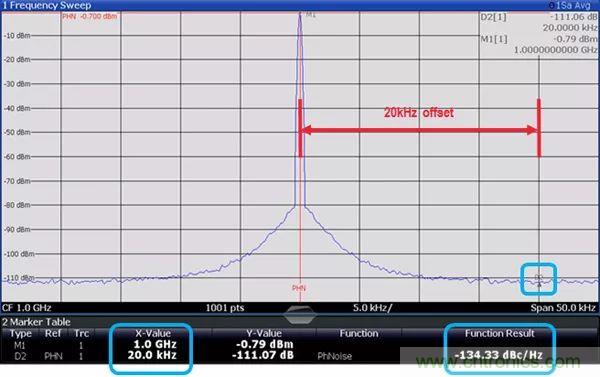
3.1.2、頻譜儀自動(dòng)測試(Phase Noise)
該方法還是基于頻譜儀測試載波功率和噪聲功率,但是可以自動(dòng)進(jìn)行測試,并顯示出完整的測試曲線,頻偏范圍可以自由設(shè)定,操作簡便快捷,精準(zhǔn)度比頻譜儀直接測試法要高,測試速度要快。

總之,頻譜儀法測試相位噪聲均基于頻譜測試的結(jié)果進(jìn)行相位噪聲的計(jì)算,該測試法無法區(qū)分調(diào)幅噪聲和相位噪聲,靈敏度受儀器固有的相位噪聲限制,無載波抑制,測量范圍受分辨率濾波器形狀因子限制,動(dòng)態(tài)范圍有限等缺點(diǎn);但是,該方法測試設(shè)置簡單、快捷,頻率偏移范圍大,可測試很多信號(hào)源的特性,比如:雜散發(fā)射、鄰信道功率泄漏、高次諧波;并且可以直接顯示相位噪聲曲線(當(dāng)調(diào)幅噪聲忽略不計(jì)時(shí))。
3.2、鑒相器測試法
3.2.1、鑒相器測試原理
鑒相器法是采用被測信號(hào)源與一同頻參考信號(hào)源進(jìn)行鑒相,鑒相器輸出信號(hào)經(jīng)低通濾波器和低噪聲放大器后輸入到頻譜儀或接收機(jī)中。
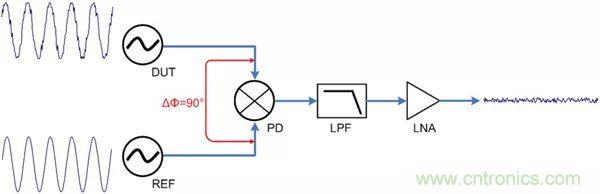
鑒相器輸入信號(hào)兩路正交信號(hào):

鑒相器的輸出信號(hào)UIF(t):
經(jīng)低通濾波,并假定ƒL= ƒR ,得到:
對(duì)于小的相差, 簡化得到:
3.2.2、延遲線測試法
延遲線法是把被測信號(hào)分成兩路,一路信號(hào)經(jīng)過延遲線后與另一路經(jīng)過一個(gè)移相器移相后的信號(hào)進(jìn)行鑒相,然后再濾波放大分析。延遲線的作用是將頻率的變化轉(zhuǎn)化為相位的變化,當(dāng)頻率變化時(shí),將在延遲線中引起相位正比例的變化。雙平衡混頻器將相位變化轉(zhuǎn)化為電壓變化。
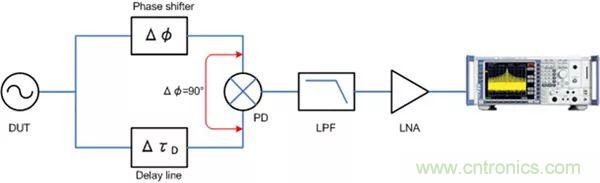
該測試方法具有載波抑制、調(diào)幅噪聲測試功能,測試時(shí)不需要額外的參考源,不需要信號(hào)同步,頻率漂移不再是問題。但是該測試方法高頻時(shí)損耗較大,使得測試靈敏度較低,而且測試時(shí)需要校準(zhǔn),操作較為復(fù)雜。
3.2.3、鎖相環(huán)測試法
由于振蕩器的相位跳動(dòng),90度的相位偏移并不能時(shí)刻穩(wěn)定。因此需要引入鎖相環(huán)路對(duì)相位進(jìn)行鎖定,以保證兩路信號(hào)相位穩(wěn)定的相差90度。
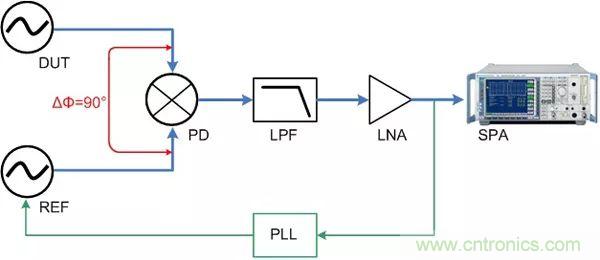
由于鎖相環(huán)路的引入會(huì)對(duì)相位噪聲測量帶來影響,在環(huán)路帶寬內(nèi),振蕩器的相位噪聲將會(huì)被改善,因此在測量過程中需要對(duì)環(huán)路帶寬內(nèi)的相位噪聲進(jìn)行修正。通過鎖相環(huán)的環(huán)路帶寬特性,可以計(jì)算出環(huán)路增益,從而可以對(duì)測量結(jié)果進(jìn)行修正。
鑒相器法測試相位噪聲具有很多優(yōu)點(diǎn)。
其中一個(gè)重要優(yōu)點(diǎn)是鑒相后信號(hào)的載波被抑制,接收機(jī)的中頻增益與載波電平無關(guān),因此可以大大提高相位噪聲的測試靈敏度。另外,可以采用低噪聲放大器對(duì)鑒相后的信號(hào)進(jìn)行放大,從而可以降低測量接收機(jī)的噪聲系數(shù),從而進(jìn)一步提高其測試靈敏度。
同時(shí),對(duì)于信號(hào)中同時(shí)存在的AM噪聲和相位噪聲。可以通過調(diào)整兩路信號(hào)的相位差,使鑒相器可以分辨AM噪聲和相位噪聲。如果兩路鑒相信號(hào)相位相差90°,則鑒相后輸出對(duì)AM噪聲的抑制可以高達(dá)40dB,當(dāng)兩路鑒相信號(hào)相位相差 0° 時(shí),則輸出結(jié)果僅有AM噪聲。
該測試方法的另一優(yōu)點(diǎn)是,相位噪聲的測試不在受參考源的限制,因?yàn)榭梢赃x擇非常好的相位噪聲的源作為測量的參考。
該測試方法還可以采用雙DUT法進(jìn)行相位噪聲的測量,當(dāng)存在兩個(gè)相同的高性能被測信號(hào)源時(shí)可以采用該方法,測量結(jié)果需要做3dB的修正。
但是,對(duì)于該測試方法也有相應(yīng)的局限性,該方法設(shè)置相對(duì)復(fù)雜,測量前有時(shí)需要做測試校準(zhǔn)和PLL參數(shù)計(jì)算;相對(duì)頻譜儀方法來說,鑒相器法的測量頻偏范圍較窄。同時(shí),由于信號(hào)源特性除了相位噪聲指標(biāo)外,還需要測量如諧波特性,雜散特性,鄰信道抑制比等指標(biāo),而該方法則無法完成這些測量,還需要用頻譜儀功能來實(shí)現(xiàn)。
3.3、數(shù)字相位解調(diào)測試法
針對(duì)以上測試方法的不足,目前最新的相位噪聲測試的方法為數(shù)字相位解調(diào)法。該測試方法可以直接進(jìn)行I/Q解調(diào)測量, 轉(zhuǎn)換為Sf(f), 再計(jì)算L(f)。數(shù)字相位解調(diào)法無鑒相器和鎖相環(huán),所以不需要進(jìn)行環(huán)路帶寬修正,可以簡化校準(zhǔn)過程。該測試方法可以測量CW相位噪聲,脈沖相位噪聲,附加相位噪聲,脈沖附加相位噪聲等多項(xiàng)指標(biāo)。同時(shí)該測試方法具有極低的參考源相位噪聲、高速互相關(guān),可以明顯提高測試的靈敏度。并且可以在大信號(hào)存在時(shí)測量小電平信號(hào)的相位噪聲。

4、脈沖信號(hào)相位噪聲測試原理和方法
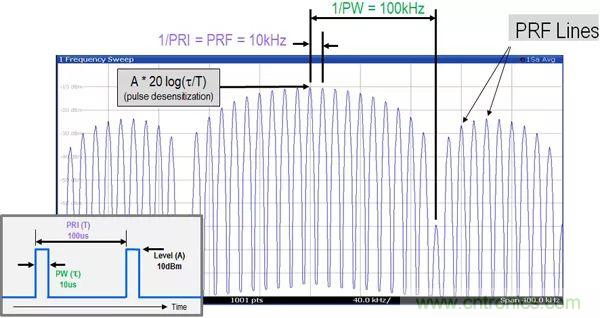
脈沖調(diào)制信號(hào)的頻譜包含了中心譜線和不同PRF處的譜線。根據(jù)相位噪聲的定義,測試脈沖調(diào)制信號(hào)的相位噪聲就需要針對(duì)不同脈沖調(diào)制參數(shù)對(duì)被測信號(hào)進(jìn)行濾波。
4.1、鑒相器法
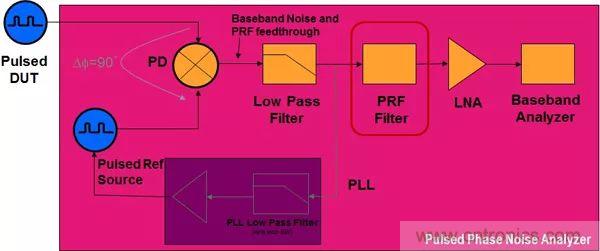
與使用鑒相器法測試CW信號(hào)的相位噪聲相比,測試脈沖信號(hào)的相位噪聲指標(biāo)就需要PRF濾波。對(duì)PRF濾波也有明確的要求:PRF濾波器必須帶內(nèi)平坦度好、邊緣陡峭;不同的PRF頻率需要不同的PRF濾波器;PRF濾波器必須在PRF/2之內(nèi)有平坦的通帶,在PRF之外有很大衰減;同時(shí)PRF濾波器衰減了PRF饋通,總之該P(yáng)RF相當(dāng)復(fù)雜,實(shí)現(xiàn)起來很困難,操作也比較復(fù)雜。
4.2、數(shù)字相位解調(diào)法
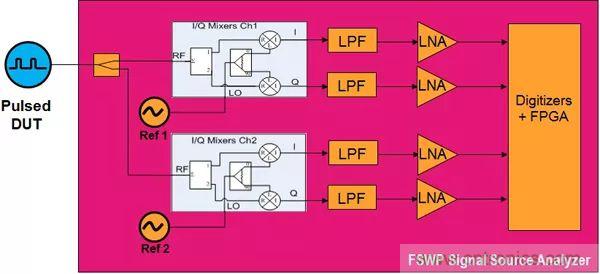
數(shù)字相位解調(diào)法得益于強(qiáng)大的數(shù)字處理能力,測試脈沖調(diào)制信號(hào)的相位噪聲實(shí)現(xiàn)起來就比較簡單,該測試方法具有與CW信號(hào)相位噪聲測試相同的結(jié)構(gòu)框圖,沒有鑒相器,無需對(duì)參考信號(hào)進(jìn)行脈沖調(diào)制。PRF濾波器和脈寬加時(shí)間門在DSP中實(shí)現(xiàn),易于處理不同PRF,無需復(fù)雜的校準(zhǔn),也可實(shí)現(xiàn)脈沖附加相噪的測量。
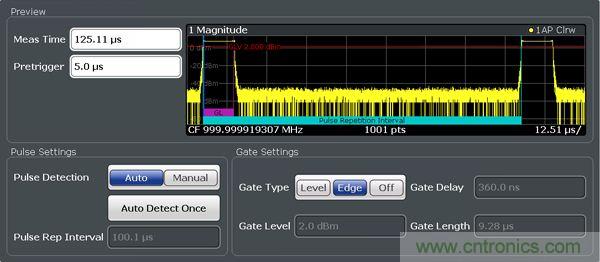
使用數(shù)字相位解調(diào)法測量脈沖信號(hào)的相位噪聲首先采用零掃寬自動(dòng)檢測脈寬和周期,檢測到脈沖信號(hào)之后可以自動(dòng)的根據(jù)脈寬設(shè)置時(shí)間門長度,根據(jù)周期設(shè)置最大頻偏,然后進(jìn)行測試。最大可測量頻偏為PRF/2,并且測試時(shí)間與連續(xù)波時(shí)相同。測試效率較高,操作相對(duì)比較簡單、方便。

5、其他相關(guān)測試
5.1、附加(殘余)相位噪聲的測試原理和方法
所謂附加相位噪聲是指由器件或電路附加的相位噪聲。例如放大器,上、下變頻器等。
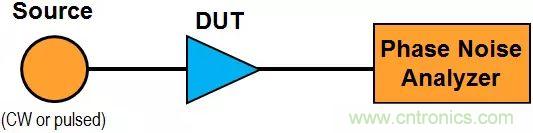
直接使用頻譜分析儀或者具有鑒相器法測試功能的信號(hào)源分析儀測試附加相位噪聲時(shí),一般都需要使用外部信號(hào)源和移相器,信號(hào)源和移相器指標(biāo)的好壞會(huì)直接影響測試結(jié)果,并且實(shí)際操作非常復(fù)雜(需要精準(zhǔn)的調(diào)節(jié)移相器的相位),由于附加相位噪聲指標(biāo)一般來說都比較低,所以該測試方法測試的結(jié)果尤其是準(zhǔn)確度比較難以令人滿意。
采用具有內(nèi)部信號(hào)源的數(shù)字相位解調(diào)法進(jìn)行附加相位噪聲的測試操作比較簡單方便,當(dāng)選擇“附加相噪”時(shí),自動(dòng)對(duì)內(nèi)部硬件進(jìn)行重新配置,該測試方法無需鑒相器和移相器,而且內(nèi)部低噪聲頻率合成器產(chǎn)生 DUT 激勵(lì)信號(hào),所以該方法很大程度上簡化了測量和校準(zhǔn)設(shè)置。
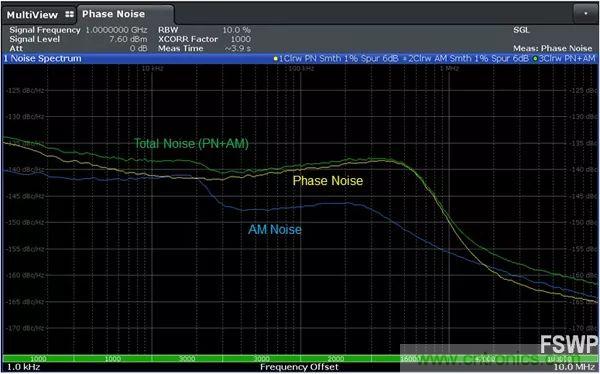
5.2、調(diào)幅噪聲的測試原理和方法
調(diào)幅噪聲測試常用的方法有兩種:一種是使用二極管檢波器進(jìn)行檢波,但該方法需要外置一個(gè)二極管檢波器,需要進(jìn)行復(fù)雜的校準(zhǔn)。另一種方法是使用AM解調(diào)的方法。使用AM解調(diào)的方法操作相對(duì)簡單,并且可以同時(shí)測試相位噪聲和AM噪聲。采用互相關(guān)法的話還可以大大提高測試靈敏度。
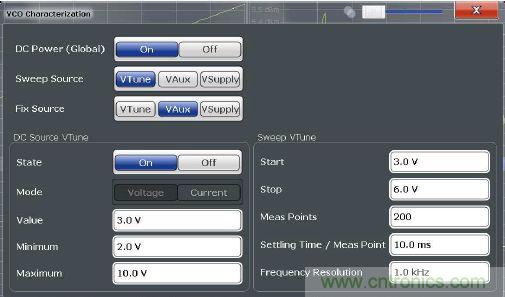
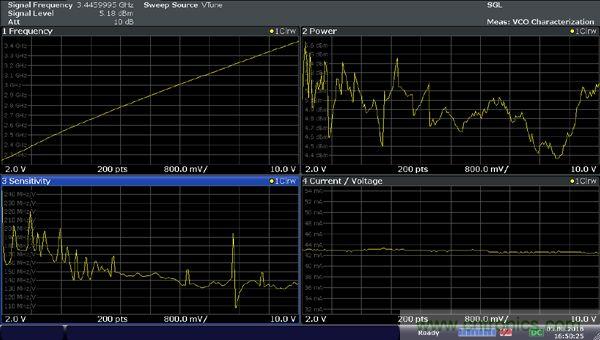
5.3、VCO測試
VCO測試對(duì)于VCO研發(fā)設(shè)計(jì)、生產(chǎn)使用具有重要的意義,目前的相位噪聲分析儀可以進(jìn)行完整的VCO測試,對(duì)被測VCO提供直流供電以及調(diào)諧供電,并測試VCO的所有參數(shù)。
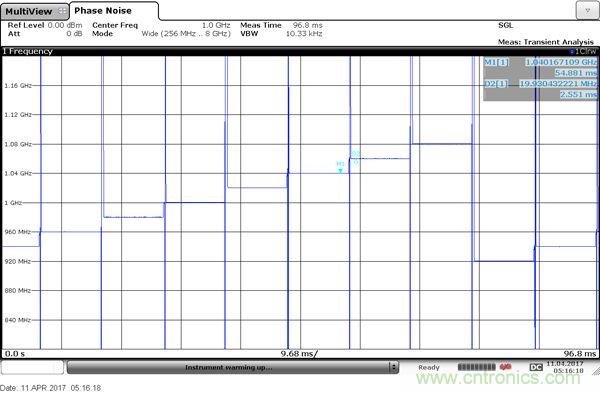
5.4、瞬態(tài)測試
基于目前的相位噪聲分析儀可以進(jìn)行瞬態(tài)測試,瞬態(tài)測試主要應(yīng)用于跳頻信號(hào)的測試,尤其是寬帶跳頻信號(hào)的跳頻時(shí)間測試。瞬態(tài)測試一般可以分為窄帶模式和寬帶模式,目前寬帶跳頻信號(hào)的分析功能可以實(shí)現(xiàn)256MHz-8GHz頻段范圍內(nèi)的跳頻信號(hào)的分析。該應(yīng)用使得寬帶跳頻時(shí)間測試變得極為簡單。

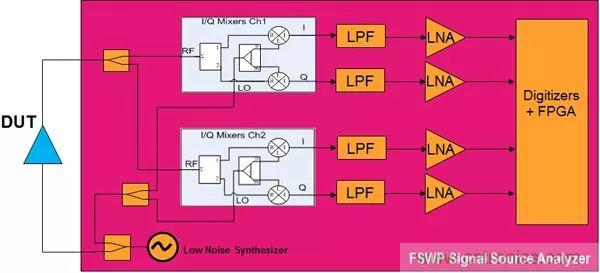
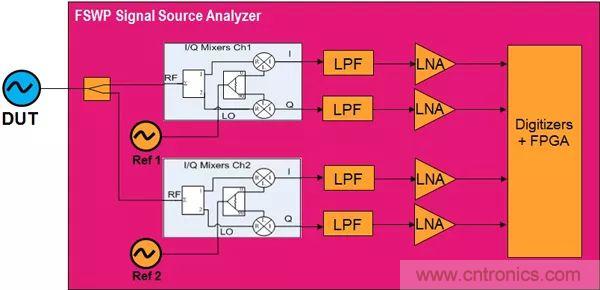
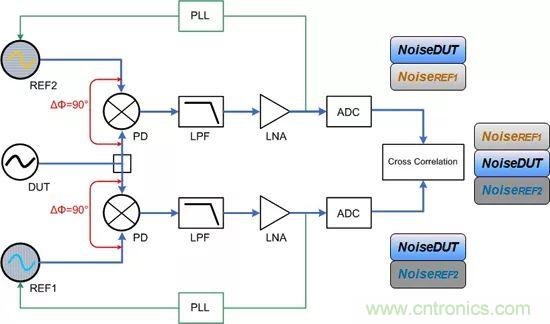
6、提高相位噪聲測試靈敏度的互相關(guān)算法
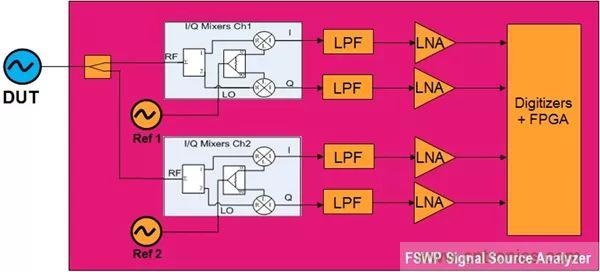
無論測試CW信號(hào)相位噪聲還是脈沖信號(hào)的相位噪聲指標(biāo),亦或是測試AM噪聲等相關(guān)測試,測量結(jié)果都會(huì)受到參考源和鑒相器本身相位噪聲的影響。為了進(jìn)一步提高測試靈敏度,降低參考源和鑒相器的影響,可以在鑒相器法或數(shù)字相位解調(diào)法的基礎(chǔ)之上采用互相關(guān)技術(shù)。其方法的核心為互相關(guān)電路以及互相關(guān)算法。被測信號(hào)被分成兩路,一路信號(hào)與一參考信號(hào)源進(jìn)行鑒相或數(shù)字解調(diào),而另一路信號(hào)則與另一參考源進(jìn)行鑒相或數(shù)字解調(diào),兩路輸出信號(hào)分別進(jìn)行濾波、放大和ADC采樣,然后進(jìn)行互相關(guān)運(yùn)算?;ハ嚓P(guān)技術(shù)對(duì)測量靈敏度的提高程度取決于互相關(guān)運(yùn)算次數(shù)。通過對(duì)10000次測量結(jié)果求和,參考振蕩器和測試系統(tǒng)的噪聲測試性能可提高20 dB。
但是,隨著互相關(guān)次數(shù)的增多,測試的時(shí)間會(huì)有所加長,尤其是載波近端的相位噪聲測試,多次互相關(guān)將需要很長的測試時(shí)間。尤其是鑒相器法采用互相關(guān)算法時(shí)會(huì)帶來較長的測試時(shí)間,而數(shù)字相位解調(diào)法基于強(qiáng)大的數(shù)字信號(hào)處理能力,與鑒相器法采用互相關(guān)算法相比較,測試速度會(huì)有較大的提高,大大提高測試的效率。
7、總結(jié)
相位噪聲指標(biāo)是射頻、微波領(lǐng)域一項(xiàng)非常關(guān)鍵的指標(biāo),相位噪聲指標(biāo)的測試是研發(fā)、設(shè)計(jì)、生產(chǎn)、調(diào)試必須進(jìn)行測試的一項(xiàng)指標(biāo),測試準(zhǔn)確度要求較高,需要考慮的因素較多。最新的數(shù)字相位解調(diào)法不需要鎖相環(huán),無需環(huán)路帶寬內(nèi)的噪聲抑制補(bǔ)償,相同靈敏度下,極大提高測試效率。數(shù)字相位解調(diào)法非常易于實(shí)現(xiàn)脈沖相位噪聲,附加相位噪聲,脈沖附加相位噪聲測試,VCO測試及瞬態(tài)測試等多項(xiàng)測試要求,可以極大的滿足多方面測試要求。并且可以進(jìn)行多種測試需求的并行測量。同時(shí)數(shù)字相位解調(diào)法測試比較簡單,無需復(fù)雜的操作設(shè)置,測試速度快。尤其是數(shù)字相位解調(diào)法基礎(chǔ)之上增加互相關(guān)算法進(jìn)行測試,使得測試靈敏度極高,是目前進(jìn)行相位噪聲測試以及其他相關(guān)測試最優(yōu)異的測試方法和手段。
推薦閱讀:

